ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
谷歌cartographer使用速腾聚创3d激光雷达数据进行三维建图
-
谷歌cartographer_ros请参考这篇安装教程:http://community.bwbot.org/topic/136/google激光雷达slam算法cartographer的安装及bag包demo测试。2020年之后购买的小强用户可以跳过安装步骤,车载主机已经配置好。
1. 数据包准备
使用cartographer_ros进行3d建图,需要三维点云数据和IMU数据,三维点云由速腾聚创3d激光雷达提供,IMU数据则由小强xq5开发平台提供。
rosbag数据包的详细制作过程,请参考这篇教程: https://community.bwbot.org/topic/522/使用rosbag录制和回放3d激光雷达数据和小强ros开发平台的里程计imu数据
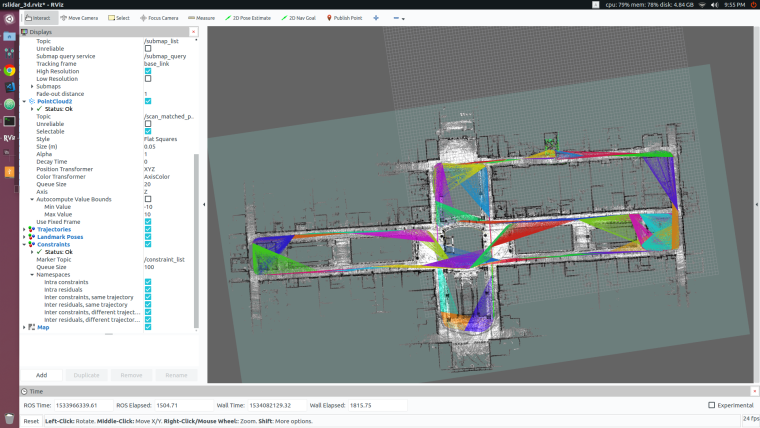
下文教程将以蓝鲸机器人录制的bag包为例,演示如何建立三维地图。bag包百度云下载地址2. 配置cartographer_ros
蓝鲸机器人github上的cartographer_ros已经配置好了所有文件,对于加装速腾聚创小强xq5开发平台采集的数据包,cartographer_ros需要使用的是下列文件,简略的说明在下文。cartographer_ros的详细文档可以参考官方wiki
cartographer_ros/launch/demo_xiaoqiang_3d.launch #建图时启动的launch文件,负责启动xiaoqiang_3d.launch文件和rviz cartographer_ros/launch/xiaoqiang_3d.launch #用来加载cartographer_ros主要的启动节点和参数文件,话题数据名字的remap也在这个文件设定。 cartographer_ros/launch/assets_writer_xiaoqiang_3d.launch #用来将demo_xiaoqiang_3d.launch输出的pbstreamfile转换成ply点云数据 cartographer_ros/urdf/rslidar_2d.urd #模型文件,用来发布3d激光雷达、小车里程计、IMU、小车本体之间的tf关系 cartographer_ros/configuration_files/xiaoqiang_3d.lua #cartographer_ros算法参数配置文件,优化建图效果需要调整的参数就是这个文件。ros中坐标系的设置,请参考这篇教程,小强xq5平台的base_link原点设置在两个主动轮轴中间位置。
# cartographer_ros)/urdf/rslidar_2d.urd文件需要调整的参数是3d雷达相对base_link的安装位置,laserbase_link等价于base_link <joint name="horizontal_laser_link_joint" type="fixed"> <parent link="laserbase_link" /> <child link="rslidar" /> <origin xyz="0 0 0.4" rpy="0 0 0" /> </joint> #小强用户速腾聚创雷达按上面设置即可 #小强用户北科天绘雷达需要把角度反转180度 <joint name="horizontal_laser_link_joint" type="fixed"> <parent link="laserbase_link" /> <child link="rslidar" /> <origin xyz="0 0 0.4" rpy="0 0 3.1415926" /> </joint>3. 启动cartographer_ros,播放rosbag数据包,开始建图
#先关闭小车的ros启动节点 #在小车主机上新开一个命令终端 sudo service startup stop roscore#启动cartographer #在小车主机上新开一个命令终端 roslaunch cartographer_ros demo_xiaoqiang_3d.launch#播放bag数据 #在小车主机上新开一个命令终端 rosbag play --clock 2018-08-11-13-20-34.bag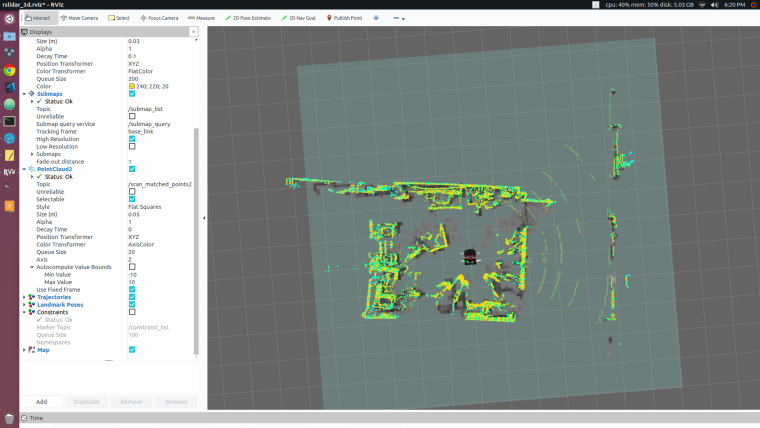
4. bag播放完成后,使用rosservice保存cartographer_ros建图结果,用于后续地图输出。
#打开ros service调用工具 #在小车主机上新开一个命令终端 rosrun rqt_service_caller rqt_service_caller #先调用/finish_trajectory服务结束建图 #接着调用/write_state服务,将cartographer_ros建图结果保存为pbstream文件,test_3d.pbfile。保存成功后,文件可以在~/.ros/目录找到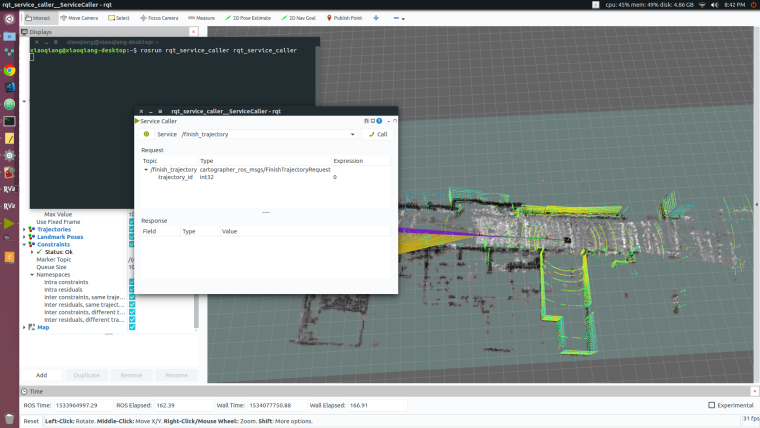
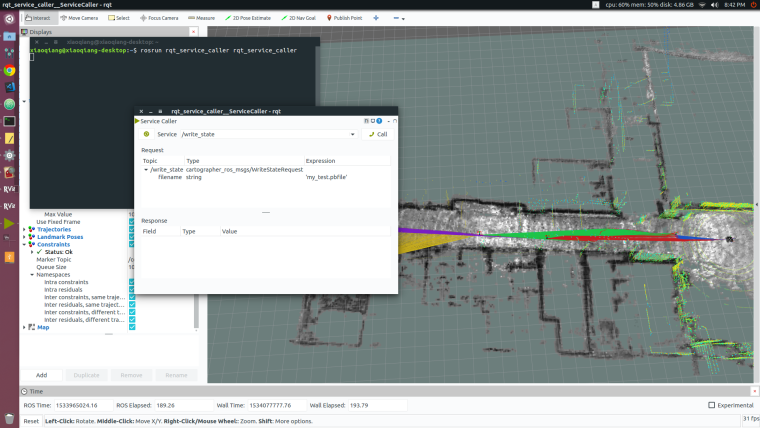
关闭cartographer_ros,建图部分完成,下文继续处理pbstream文件得到点云地图文件5.用assets_writer_xiaoqiang_3d.launch将pbstream文件转换成ply点云文件
#在小车主机上新开一个命令终端,下面是一条命令,假设bag文件和pbstream文件保存在了home目录 roslaunch cartographer_ros assets_writer_xiaoqiang_3d.launch bag_filenames:=${HOME}/2018-08-11-13-20-34.bag pose_graph_filename:=${HOME}/test_3d.pbfile等待一段时间,处理完成后命令会自动退出,此时在bag文件旁边会生成一个.bag_points.ply后缀文件,这个就是点云文件。
6.使用pcl工具将ply文件转换成pcd文件
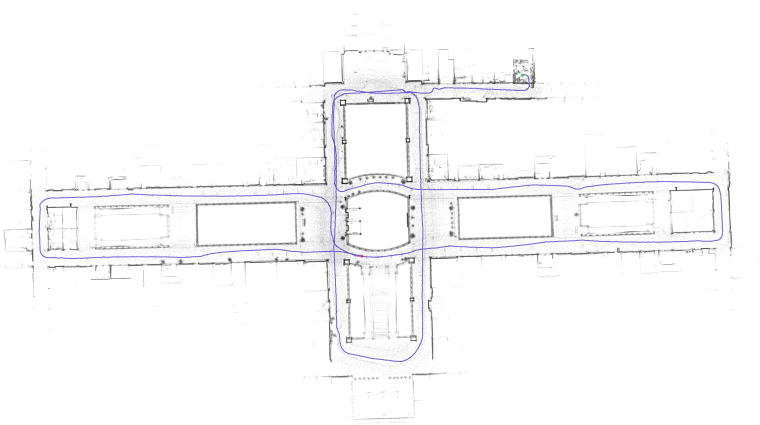
#在小车主机上新开一个命令终端,假设ply文件在home目录 pcl_ply2pcd 2018-08-11-13-20-34.bag_points.ply test_3d.pcd转换成功后就可以得到tes_3d.pcd文件,可以直接用pcl可视化工具查看
pcl_viewer test_3d.pcd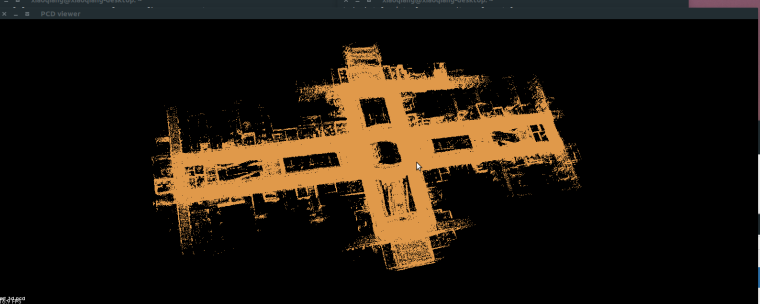
-
大佬,我用ubuntu14.04+ros indigo,下载的cartographer_ros_master编译的时候报错
CMake Error at cartographer_ros/cartographer_ros/CMakeLists.txt:39 (include): include could not find load file: /functions.cmake CMake Error at cartographer_ros/cartographer_ros/CMakeLists.txt:42 (google_initialize_cartographer_project): Unknown CMake command "google_initialize_cartographer_project". -- Configuring incomplete, errors occurred! See also "/home/gahoo/lanjing_ws/build/CMakeFiles/CMakeOutput.log". See also "/home/gahoo/lanjing_ws/build/CMakeFiles/CMakeError.log". Invoking "cmake" failed您知道什么原因么
-
@gahoo 在 谷歌cartographer使用速腾聚创3d激光雷达数据进行三维建图 中说:
functions.cmake
你的cartographer可能没有安装好,function.cmake没有找到。这个文件位于cartographer包内。
安装的方法可以参照这里indigo比较老了建议更新到kinetic
-
@weijiz 好的,我试试
-
@weijiz
大佬,我按照那个网址重新装cartographer。
安装prtobuf 3.0中cmake -DCMAKE_POSITION_INDEPENDENT_CODE=ON -DCMAKE_BUILD_TYPE=Release -Dprotobuf_BUILD_TESTS=OFF …/cmake这一步报错,显示
CMake Error at protoc.cmake:9 (add_executable): Cannot find source file: /home/gahoo/lanjing_ws/protobuf/build/version.rc Tried extensions .c .C .c++ .cc .cpp .cxx .m .M .mm .h .hh .h++ .hm .hpp .hxx .in .txx Call Stack (most recent call first): CMakeLists.txt:210 (include) – Generating done – Build files have been written to: /home/gahoo/lanjing_ws/protobuf/build这个问题怎么解决呢……
-
大佬,这边建图还有一个问题,就是我bag包播放完后,用
rosrun rqt_service_caller rqt_service_caller,在下拉栏中没有找到/finish_trajectory服务。并且在启用
rosrun rqt_service_caller rqt_service_caller命令时后,显示蓝色的类似报错的ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /rqt_gui_py_node_12156/get_loggers: Unable to communicate with service [/rqt_gui_py_node_12156/get_loggers], address [rosrpc://gahoo-CW65S:36901] ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /play_1537344541526081508/get_loggers: Unable to communicate with service [/play_1537344541526081508/get_loggers], address [rosrpc://gahoo-CW65S:40739] ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /rqt_gui_py_node_11811/set_logger_level: Unable to communicate with service [/rqt_gui_py_node_11811/set_logger_level], address [rosrpc://gahoo-CW65S:45377] ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /play_1537344541526081508/set_logger_level: Unable to communicate with service [/play_1537344541526081508/set_logger_level], address [rosrpc://gahoo-CW65S:40739] ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /rqt_gui_py_node_11811/get_loggers: Unable to communicate with service [/rqt_gui_py_node_11811/get_loggers], address [rosrpc://gahoo-CW65S:45377]大佬这是什么原因?
-
@gahoo 没有遇到过这个情况,不太清楚
-
@weijiz
大佬,我这边再试了一下,现实的蓝色报错更变了ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /submap_query: Unable to load type [cartographer_ros_msgs/SubmapQuery]. Have you typed 'make' in [cartographer_ros_msgs]? ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /finish_trajectory: Unable to load type [cartographer_ros_msgs/FinishTrajectory]. Have you typed 'make' in [cartographer_ros_msgs]? ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /start_trajectory: Unable to load type [cartographer_ros_msgs/StartTrajectory]. Have you typed 'make' in [cartographer_ros_msgs]? ServiceCaller.on_refresh_services_button_clicked(): could not get class of service /write_state: Unable to load type [cartographer_ros_msgs/WriteState]. Have you typed 'make' in [cartographer_ros_msgs]?这个有遇到过么。。。
-
@gahoo 大佬我明白了,我没有设置环境变量。。。
-
此回复已被删除! -
@weijiz 大佬,我在调用/write_state服务服务的时候,在response中message的value显示为fail to write,在~/.ros目录中也没有找到test_3d.pbfile。这个怎么解决呢?
-
@gahoo 在调用此服务时是否正确设置了调用参数。此时终端是不是有错误提示?
我把你之前的问题恢复了。如果别人有类似问题也可以做一个参考。 -
@weijiz 那张图没认真看,在调用/write_state时忘了设置名称了,现在成功了,谢谢大佬!!!
-
此回复已被删除! -
@rolandyin https://github.com/BluewhaleRobot/cartographer_ros
-
@weijiz 好的!多谢
-
@gahoo 请问你是怎么解决这个问题的呢,我也遇见了,多谢多谢
-
@rolandyin 哪个问题,我加你QQ你没回
-
@gahoo 我现在按流程走一遍,没有生成ply文件,您遇到过这种情况吗?
-