ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
谷歌cartographer使用速腾聚创3d激光雷达数据进行三维建图
-
请教下这个例程里有没有用车的轮式里程计的信息。就是我现在已经得到准确的里程计,然后用这个算法建图可以么。
-
-
@fgy4010 我也没生成.ply文件,反而生成的是.png文件,不知道怎么回事?请问怎么解决?
-
@xiaoqiang 你好,我这边没有生成.ply文件,倒是生成了很多.png文件,请问这是什么原因?要怎么解决?谢谢!
-
@weijiz @xiaoqiang 为什么打开rviz后显示"No tf data.Actual error: [map] does not exist",但我的机器人模型单独是可以发布tf的,而且机器人的模型也有错误,好几个link显示:No tranform from [] to [map]?请问应该怎么解决呢
-
@Duke-Allen cartographer还没有正常工作,没有开始建图所以没有发布map相关的tf。先让 cartographer正常工作,开始建图后就有了
-
@xiaoqiang @weijiz
先运行的cartographer然后打开的数据包,终端显示这种错误
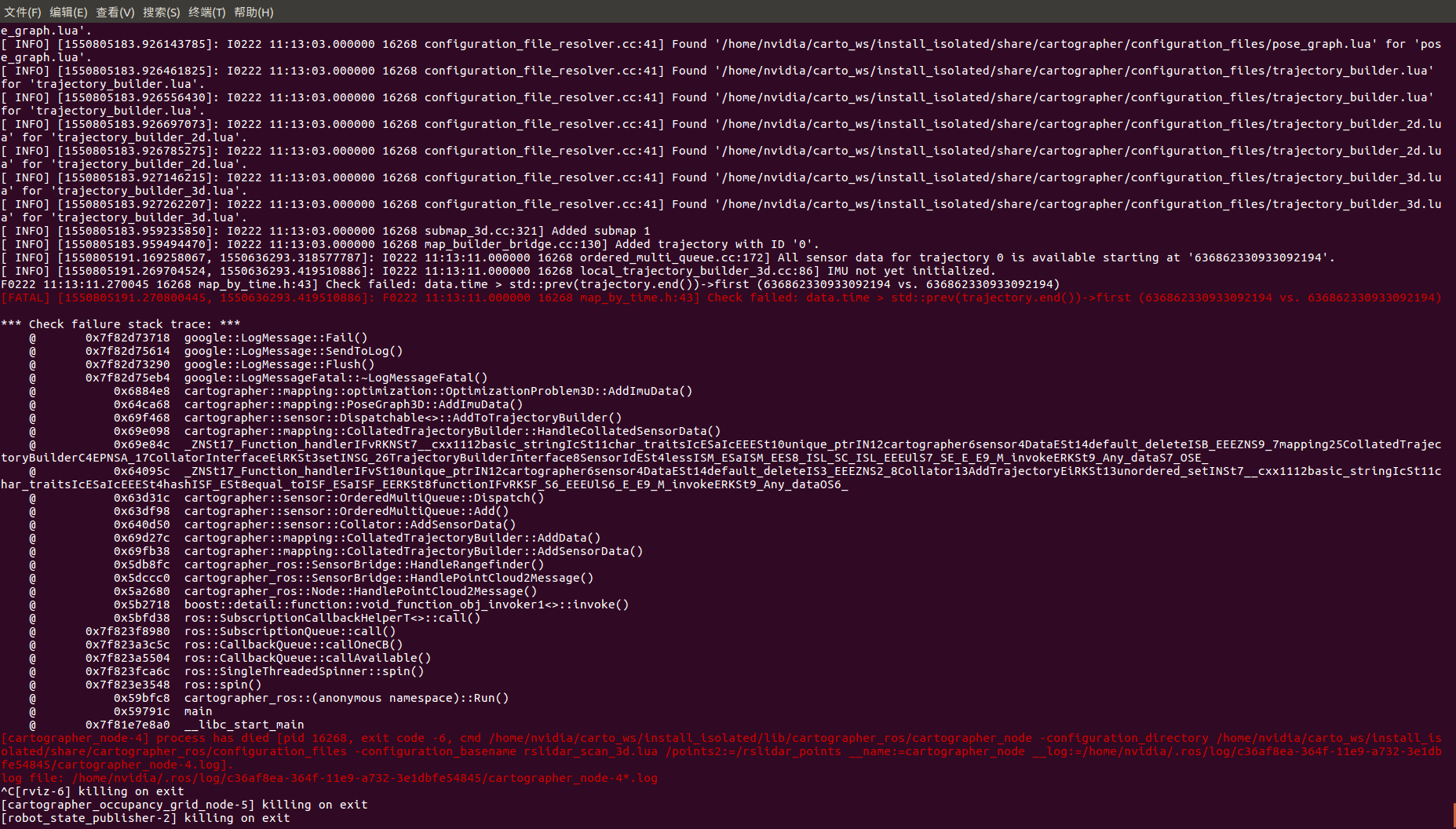
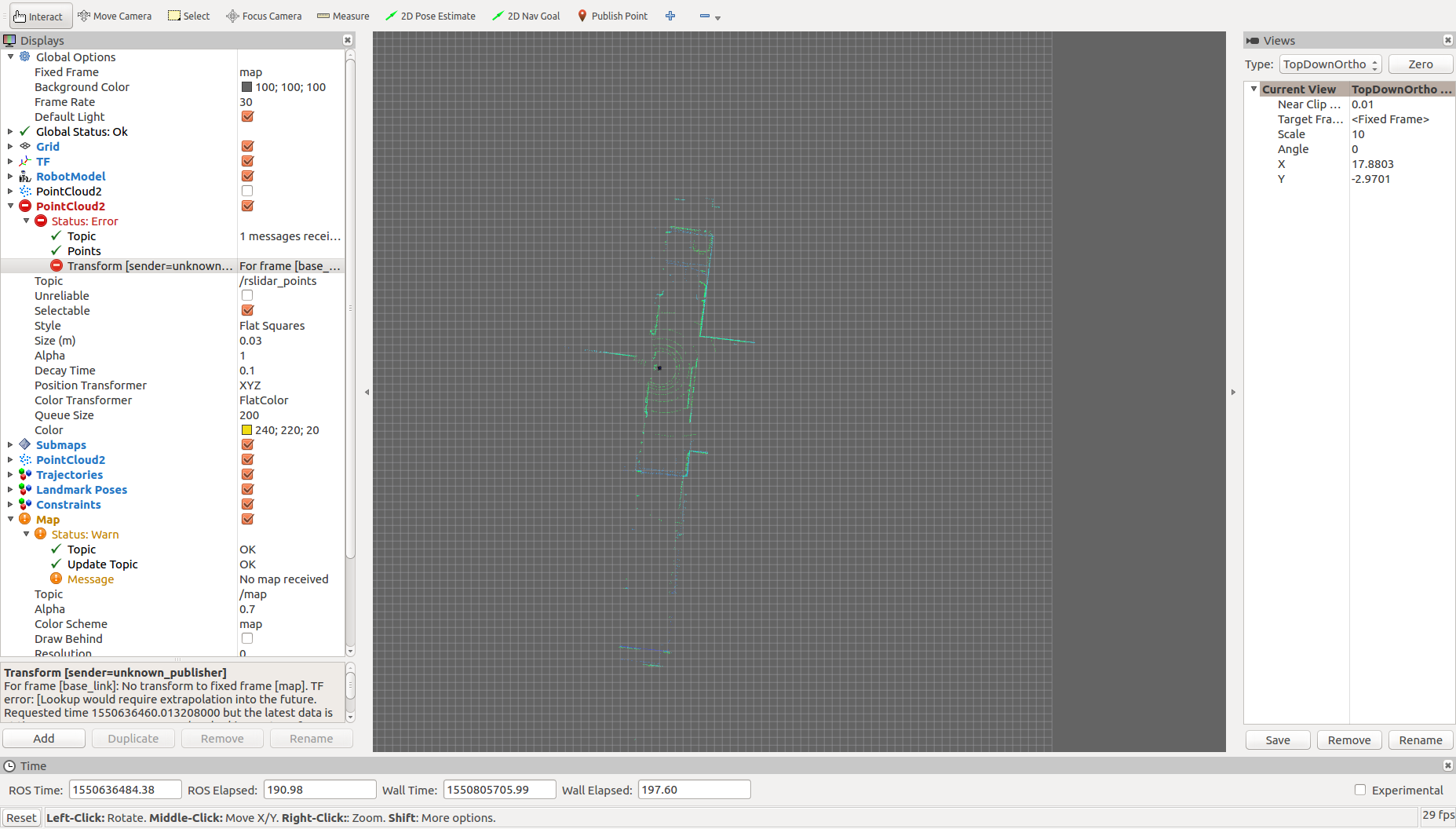
rviz中
我录的数据集是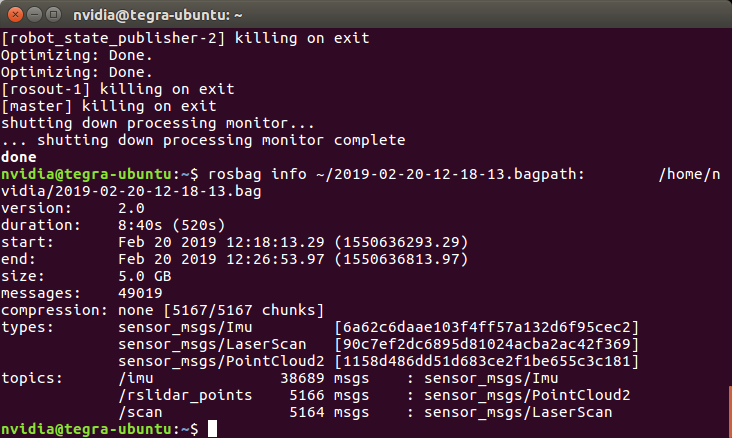
但是rviz中没有显示建图
请问这是什么情况呢?该怎么解决呢? -
This post is deleted! -
@xiaoqiang
请问一下小强机器人的IMU数据经过处理了吗?我用的IMU是MPU6050,是否需要将三轴加速度、陀螺值进行处理再传入呢?还有我看cartographer官方指南中说使用IMU的话,tracking_frame必须与IMU的frame一致,laserbase_link与小强所用IMU的帧一致吗? -
This post is deleted! -
This post is deleted! -
@Duke-Allen 我也遇到了图一相同的问题,请问您是怎么解决的
-
老师,这样建的地图是这种pcd格式,能直接用于amcl和move_base两个包的定位导航吗?如果不能应该怎样修改
-
-
@weijiz 谢谢老师,这样建出来的二维地图在使用过程中是不是就缺少了很多三维特征?那使用多线的雷达进行定位导航的效果是不是就和使用单线的雷达一样了?
-
@li move base也有3d的插件,但是我没用过。你可以自己研究一下 https://github.com/ros-planning/3d_navigation
-
@weijiz 老师,我在使用cartographer建图过程中感觉没有进行闭环,建出的图还是斜的,请问应该怎样操作?
-
This post is deleted! -
This post is deleted! -
@GaHoo 请问一下,我也遇到了rqtservce找不到finishtrajectory这个问题,报了一堆蓝字,也有红错,请问您是怎么解决的呢?