ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang tutorial (20) get vision odometer and display the xiaoqiang track in the rviz
-
1.Local ssh preparation section (Xiaoqiang host is the controlled end, local refers to remote control end)
ssh remote login Xiaoqiang host, the following operation is entered in this ssh window if without special statement
ssh xiaoqiang@xxx.xxx.xxx.xxx # Please replace xxx.xxx.xxx.xxx with Xiaoqiang's current actual ip address # Start multi-window manager screenScreen usage please refer to this tutorial
Check if the
orb_initpackage has installedrospack find orb_initDelete if it exists
cd ~/Documents/ros/src rm -r orb_initDownload the latest version of orb_init from the Bluewhale Open Source Software Store and install it
cd ~/Documents/ros/src git clone https://github.com/BlueWhaleRobot/orb_init.gitCheck whether startup task is running
sudo service startup statusIf runing is displayed, it means normal. If stopped is displayed, then restart it
sudo service startup start # If you want to close this task, you can use this command sudo service startup stopCheck system status
rostopic echo /system_monitor/reportIf it is normal, the display is as follows
imageStatus: True odomStatus: True orbStartStatus: False orbInitStatus: False orbScaleStatus: False brightness: 0 power: 12.34432If it is abnormal, restart the startup task.
sudo service startup restartStart ORB_SLAM in another command window in screen
roslaunch ORB_SLAM ov2610.launchReturn to the previous screen window and wait for ORB_SLAM to start
rostopic echo /system_monitor/report # If ORB_SLAM is started, the following is displayed orbStartStatus: True2.Native local operation section
This machine has been installed ros jade version of the robot system, the computer operating system is ubuntu14.04, ros can be installed to refer to this tutorial.
Add this machine to Xiaoqiang’s ros network, open a command line terminal locally, and add Xiaoqiang’s ip in the local hosts file.
sudo gedit /etc/hosts Add to xxx.xxx.xxx.xxx xiaoqiang-desktop Save and exit Please replace xxx.xxx.xxx.xxx with Xiaoqiang's current actual ip addressJoin ros LAN
export ROS_MASTER_URI=http://xiaoqiang-desktop:11311 rostopic listIf the join is successful, the command line will output the topic on Xiaoqiang’s host. For more information about setting up multiple ros machines online, please refer here.
Download the rviz configuration file. This configuration file can also be copied directly from the orb_init package on Xiaoqiang’s host to view the output path of the Xiaoqiang vision system.
Enter in local command line terminal
rvizWhen the window opens, click on file->open in the upper left corner and select the above downloaded configuration file. At this time the interface should appear as shown below
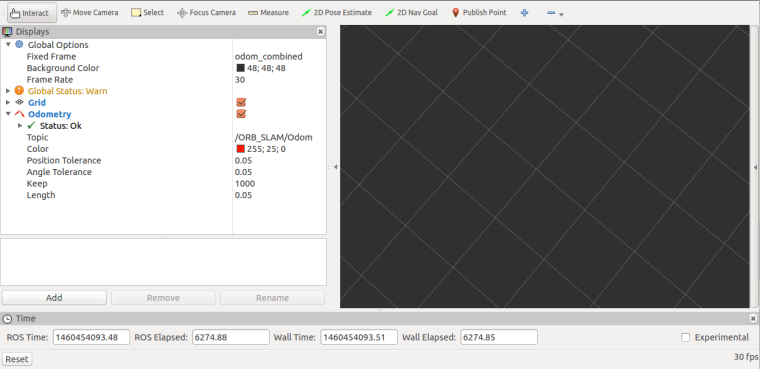
3.In ssh in the screen to open a new window, used to start orb_init Xiaoqiang host, before the start to ensure Xiaoqiang around two square meters of free space, Xiaoqiang will move for some time
rosrun orb_init orb_scale.pyAfter orb_init initialization is completed, orb_init cannot be closed. It will continue to output the visual odometer topic. This topic is the content that the local rviz needs to display. At this time, a new window is opened to check the system status.
rostopic echo /system_monitor/reportIf it is normal, the display is as follows
imageStatus: True odomStatus: True orbStartStatus: True orbInitStatus: True orbScaleStatus: True brightness: 0 power: 12.34432At this point we have already acquired Xiaoqiang’s visual odometer
4.In ssh in the screen to open a new window, used to control Xiaoqiang move
rosrun nav_test control.pyUse the arrow keys to control the movement of Xiaoqiang. Spacebar is stopped. Ctrl + C exits the program.
5.As Xiaoqiang moves, the rviz interface on the local machine will be updated to show Xiaoqiang’s trajectory in real time. Our own test video is here. For more information on how to use rviz, see here.