ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
蓝鲸ROS镜像发布
-
本文列出所有已发布的蓝鲸ROS系统镜像,用户可以根据自己需要进行选择。
蓝鲸ROS是蓝鲸智能机器人公司在Ubuntu ROS的基础上进行修改而制作的ROS系统镜像。其中包含了ROS系统和常用的一些ROS软件包。非常适合ROS学习和开发人员使用。系统安装完成后不需要再安装配置ROS,即可直接使用。蓝鲸ROS也是小强的系统镜像,可以安装在小强上直接使用。对于实体小强机器人,重装系统后请根据这篇教程完成后续配置。https://community.bwbot.org/topic/2939/如何在重装系统后恢复xiaoqiang设置
注意在虚拟机上安装推荐使用Vmware Player
系统配置要求
内存最低1.5G推荐2G
存储空间至少30GNoetic 最新版本
xq4 pro 和xq5通用版本:xiaoqiang-noetic_2021-11-12.iso 下载地址
版本
xq5-noetic_2020-10-29下载地址版本
xq5-noetic_2020-07-16下载地址
md5: 3EF9EE329283B3009B22EF1E7C9A856D已知问题:
在未插显示器和视频转接头的情况下VNC远程会黑屏。这个是Gnome的问题,无法很好的解决。
如果想在无显示器和转接头情况下VNC访问可以试试这里的方法。这个方法也有一些问题,比如无法播放声音。Kinetic 最新版本
版本
xq_os_v2.0.10-2018-11-08.iso(kinetic版本)
可以在小强Pro上使用,也可以在自己电脑上使用
下载地址
md5: 6E093DDF851852C50316F86A279DB22B说明:
注意此镜像更改了默认的udev规则,设备和usb端口绑定。串口插在对应的USB位置上才能识别。如果安装完成镜像后无法遥控,查看/dev文件夹下是否有ttyUSB001,如果没有则把U转串换一个USB接口。直到出现为止。
增加奥比中光支持版本
xq_os_v2.0.11_xq5-2019-12-21.iso.(kinetic版本)
可以在XQ5上使用,也可以在自己的电脑上使用
下载地址
md5: 1E9DB219A28936CA2366BAB2CC4D41F9版本
xq_os_v2.0.7_mini_2019_01_15.iso(kinetic版本)
可以在小强mini上使用,也可以在自己电脑上使用
下载地址
md5: 4A37DA0FCC09866615A5CAEBE91B4CE9Jade最新版本
版本
xq_os_v1.0.3_2017-10-31
可以在小强Pro上使用,也可以在自己电脑上使用
下载地址
md5: afbf1c8026733c4f8063778846c84e9b版本
xq_os_v1.0.4_mini_2017-11-17
只能在mini上使用
下载地址
md5: e874c78088211dff3feabd92f86275e7注意事项
下载完成之后一定要做一下md5的检查,确认文件完整性
注意安装时的用户名只能是xiaoqiang,否则会有问题镜像安装方法
在虚拟机中安装
打开虚拟机软件,这里使用的是Virtualbox。下载地址
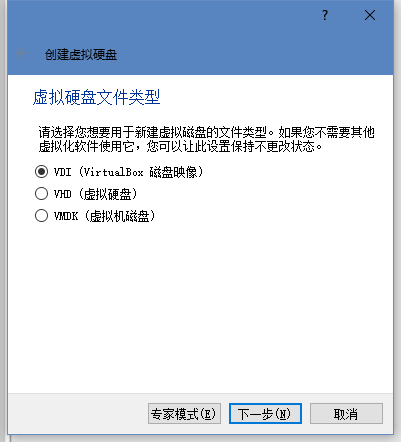
点击创建按钮,开始创建虚拟机
注意在系统选择列表中选择Ubuntu 64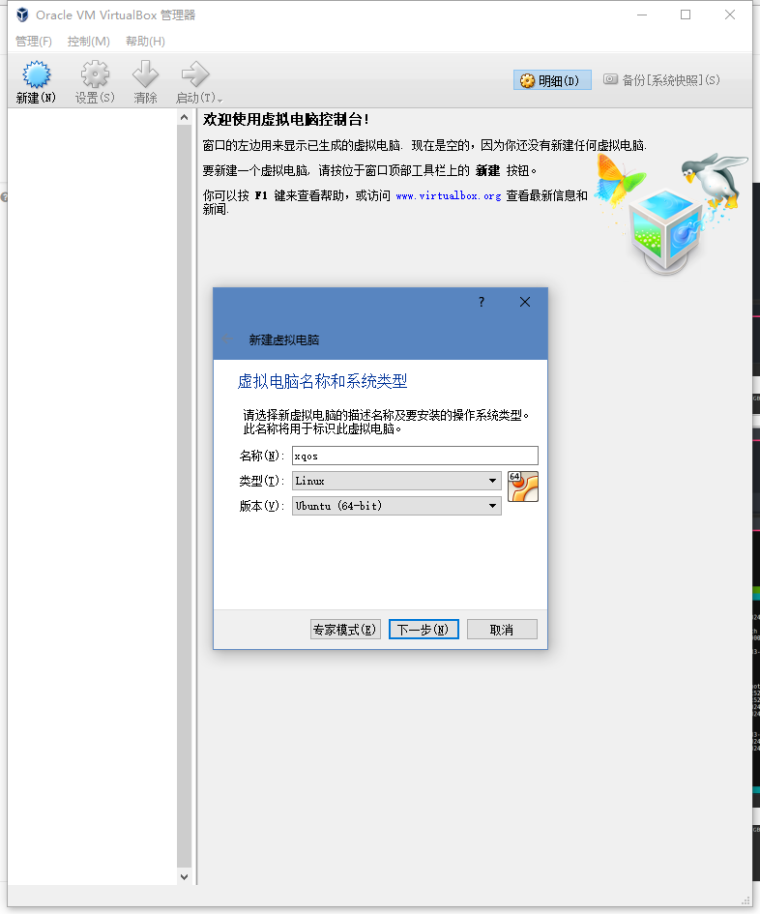
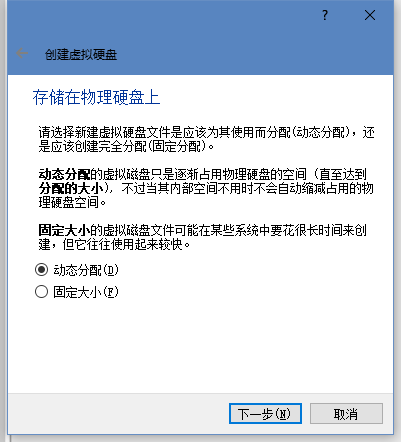
按照图上设置,完成后点击下一步
内存建议设置成2G,内存太小可能会导致无法启动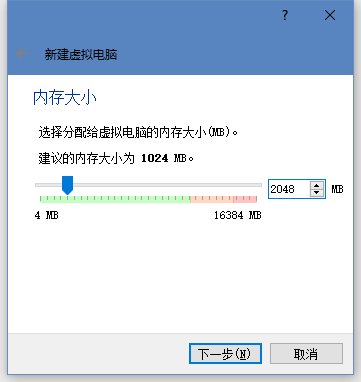

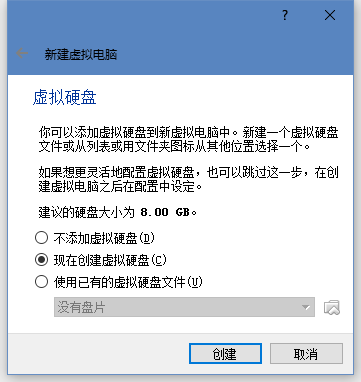
设置完成后,点击上面的设置按钮。在弹出的对话框中选择存储。点击存储界面右侧的光盘图标设置镜像文件
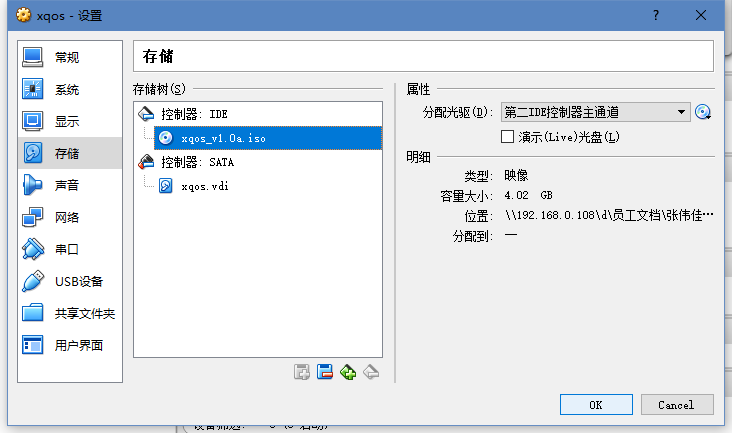
设置完成之后点击主界面的启动按钮。等待载入系统的选择界面。
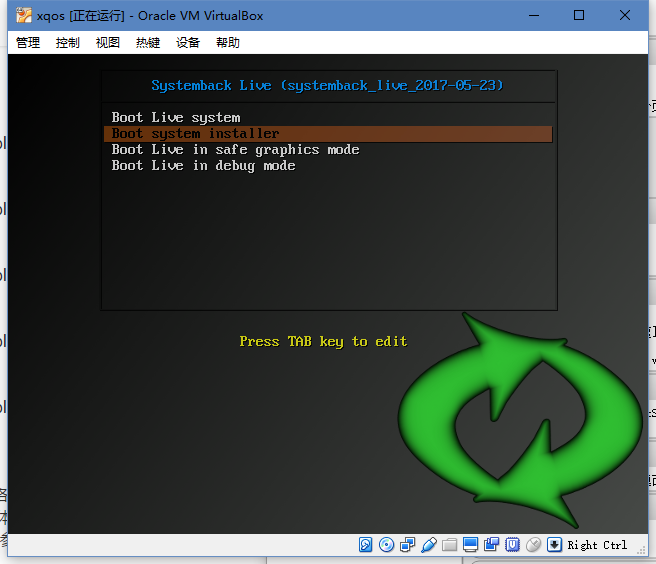
如果想要安装系统则选择第二个选项,之后按回车确认。
等待系统安装程序载入,这个过程和你的机器性能相关,如果机器性能较差可能会载入较长时间。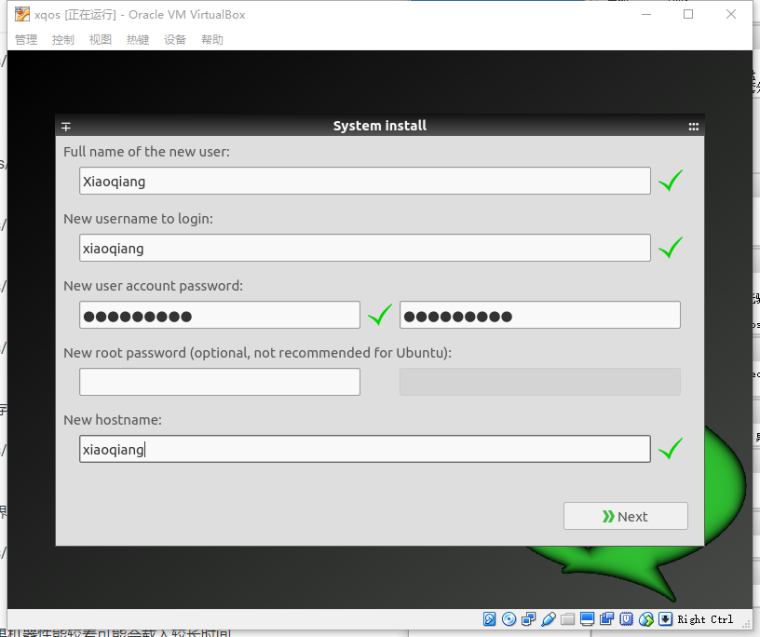
载入完成之后设置用户信息,注意用户只能是
xiaoqiang, hostname可以随意设置。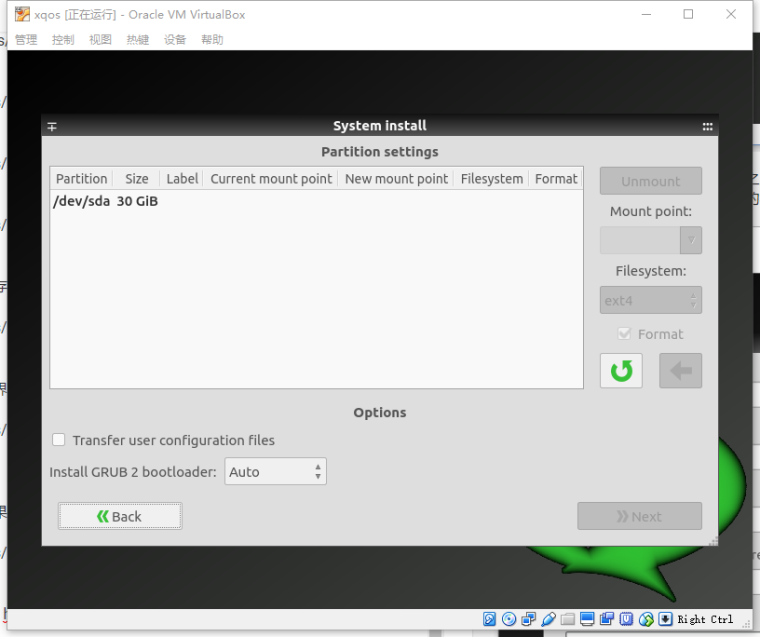
点击下一步进入分区界面。
选中你要安装的硬盘,然后点击Delete按钮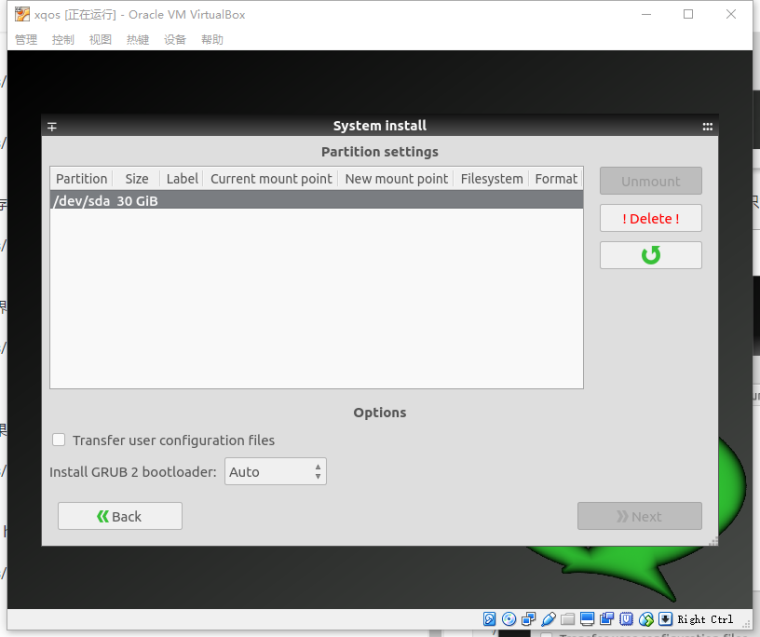
再次选择硬盘中的新分区
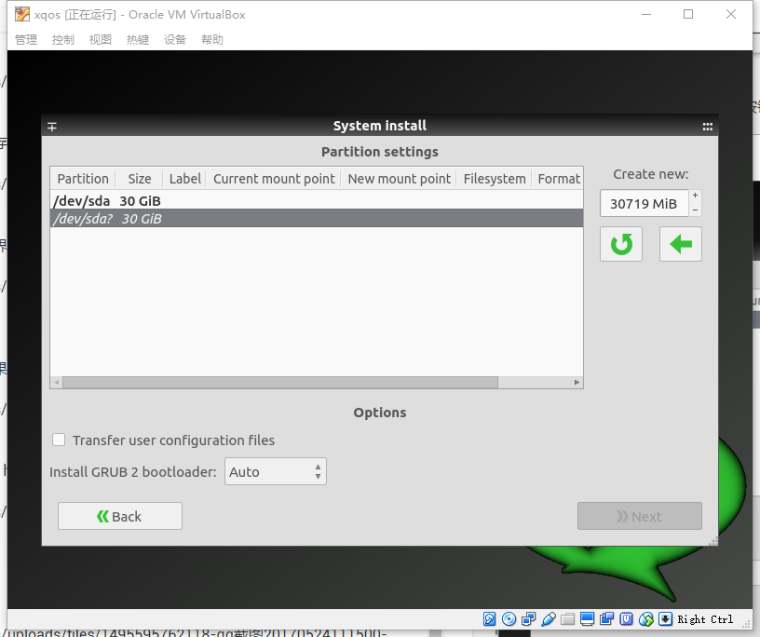
点击箭头进入下一步
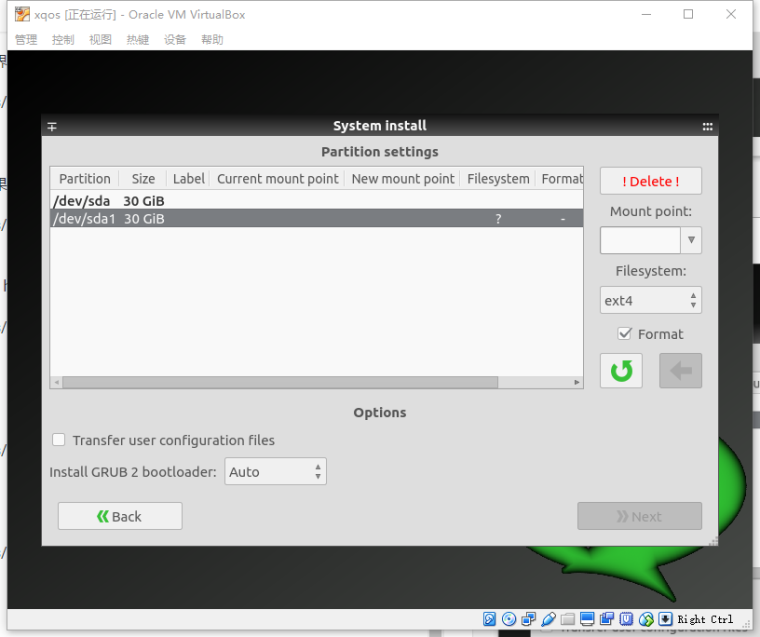
再次选择刚才新建的分区
设置右侧的Mount point,再次点击箭头进入下一步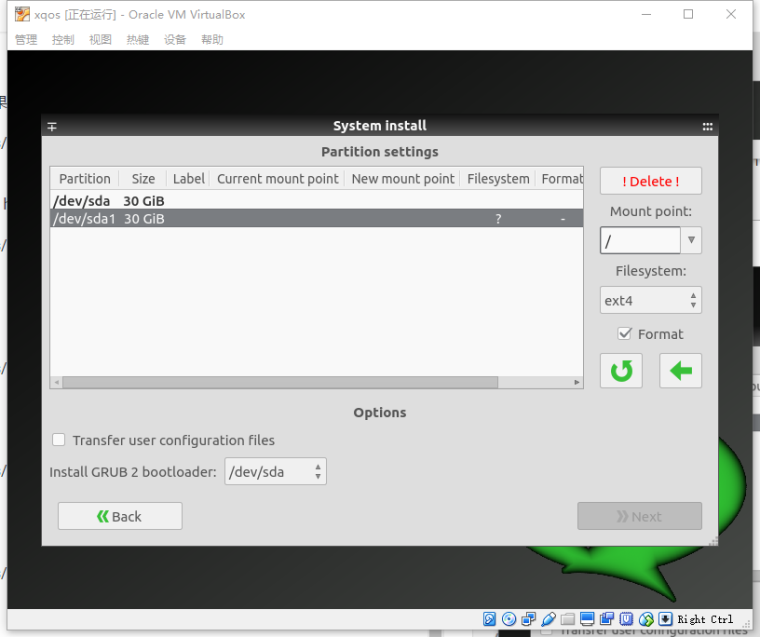
勾选transfer user configuration files注意在实际的电脑上安装时,分区的时候,要给boot单独的分区,然后选择下面的grub安装位置。否则系统安装完成后是无法启动的。对于不同的启动方式分区也有些不同。以grub方式启动的要给/boot单独分区,以uefi方式启动的要给/boot/efi单独分区。具体的分区信息可以看Install GRUB 2 bootloader的右侧的提示信息。注意一定要保证Install GRUB 2 bootloader不是disable状态。在给实际的电脑安装的时候,推荐的分区方式是 1G给 /boot/efi, 4G给swap,剩下的全部分给/。
点击右下角的next就可以继续了。如果你还想设置其他分区可以按照以上的步骤进行设置。
等待系统安装完成后重新启动就可以了。
在实际的电脑上安装
安装过程和一般的安装Ubuntu是一样的。下面介绍一下如何用U盘安装系统。
首先你要在自己的硬盘上准备一个空白的分区用来安装系统。
然后下载ultroiso软件。 下载地址
在电脑上插入自己的U盘。
用软件打开iso文件。在菜单栏中选择启动 -> 写入硬盘镜像,弹出界面如下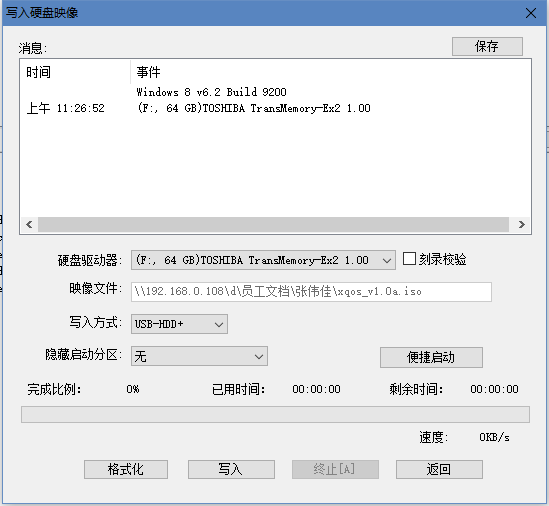
点击写入,等待写入完成。
写入完成之后,把U盘插入想要安装系统的电脑上。启动时进入BIOS选项,选择从U盘启动。后面的安装过程就基本上是一样的了。
注意在分区的时候,要给boot单独的分区,然后选择下面的grub安装位置。否则系统安装完成后是无法启动的。对于不同的启动方式分区也有些不同。以grub方式启动的要给/boot单独分区,以uefi方式启动的要给/boot/efi单独分区。一般情况下用U盘安装都需要给/boot/efi单独分区。虚拟机软件下载
Vmware Player -
此回复已被删除! -
小强pro,装虚拟机是装这个吗
-
@Jockey 是的
-
请问一下我用的自己网上买的i3工控机,想用小强的ROS镜像,推荐用哪个版本合适啊?
-
-
-
@Jockey 虚拟机内存硬盘设置大一些。只有最新版本是支持的
-
@weijiz 好的,谢谢,我再试试
-
-
-
@weijiz 执行了systemback-sustart finstall命令,安装完成后重启卡在了这里

-
@weijiz 虽然界面上卡在了这里,但是ssh能连接上,执行rostopic list后也能正常显示服务。
你们的windows程序也能连接上 -
@Jockey 那说明显示部分有问题。具体原因我也不清楚
-
@weijiz 也试试了你们的伽利略导航系统SDK,能正常连接上。能满足我的需求了
非常感谢了
-
@weijiz 小强OS接收伽利略导航系统SDK的相关命令的日志,能从哪里找到
-
@Jockey 这个没有提供日志。sdk自己会有log信息。同时sdk发布的消息实际上发送到了 /galileo/cmds 话题。可以监控此话题收到的数据。sdk相关的问题请在sdk相关的帖子内回复,或另开一个帖子。
-
虚拟机里安装后显示黑屏是什么情况,这个系统是一定要连接机器人吗
-
@liuyizhe 可能是虚拟机配置不够,内存要至少2G,硬盘至少40G
-
此回复已被删除!