ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
如何获取伽利略证书
-
伽利略导航系统在运行时会检查证书。小强用户可以向管理员免费索取。下面介绍一下证书的获取和使用方法
获取证书
通过QQ联系管理员(1024313822),在自己的小强上运行ifconfig,并把结果截图发给管理员
管理员之后会给你发送证书文件
证书的使用
把证书文件
key.sig文件放入Documents/.galileo文件夹里面。然后运行此文件夹中的verify_tool文件。注意.galileo是一个隐藏文件夹。可以通过按 Ctrl + H显示隐藏文件夹。
在此文件夹按住shift同时点击鼠标右键,在菜单中选择Open in Terminal
输入
./verify_tool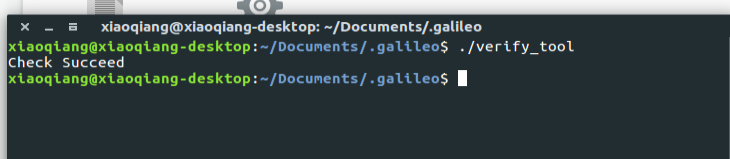
如果证书没问题,就会有如上的输出。
常见的问题
Q: 证书验证失败
A: 小强Pro用户需要保证的自己的网络设备有enp2s0设备。在有些特殊情况下,有时候会没有对应的网络设备。可以参照这里的文档添加udev规则修改网络设备名称。比如对于小强mini用户可以创建
/etc/udev/rules.d/70-persistent-net.rules文件。在文件中添加SUBSYSTEM=="net", ACTION=="add", DRIVERS=="?*", ATTR{address}=="00:e0:4c:68:4a:ff", ATTR{dev_id}=="0x0", ATTR{type}=="1", NAME="enp2s0"其中
00:e0:4c:68:4a:ff替换成自己的mac地址。修改完后重启生效。Q: 需要什么版本的系统
A: 目前只支持Ubuntu 16.04。对于14.04以及比较老的系统需要更新系统后使用。更新系统请参考这里