ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
星秒科技tof激光雷达PAVO的ros驱动安装与测试
-
下载链接:PAVO激光雷达windows资料包
星秒科技激光雷达pavo的供电是直流12v 1A,通信接口是rs485网络接口。小强ros开发平台用户可以用底盘dc电源头供电,主机的网口也可以直接连接雷达。下面介绍它的ros驱动安装和测试教程,如果是和小强平台一起购买的雷达,小强主机出厂时已经配置好驱动,请直接跳过安装部分。
1.在windows平台设置雷达网络接口参数
pavo雷达的网络接口是静态ip分配方式,且需要用官方配置软件编辑它的固件才能设置网络参数。
使用官网提供的PavoView软件,根据《PavoView使用指南-V1.1.2.pdf》手册设置雷达和主机的ip地址。因为主机往往还需要连接其他网络,因此最好按照下图设置成169.254.x.x网段,这个网段ubuntu默认为本地网络,不会干扰其它网络的运行。
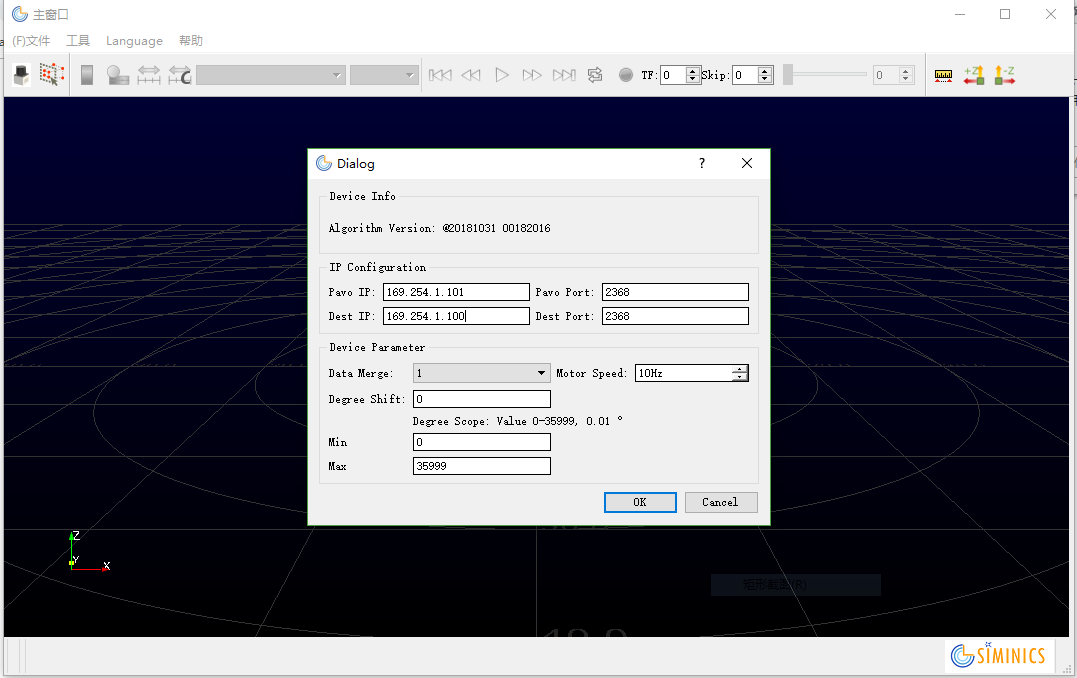
它的ros驱动也需要指定ip地址参数,为了后续教程的方便,请将ip地址按照上图的地址设成一模一样2.根据步骤1中的ip地址设置ros主机的有线网络
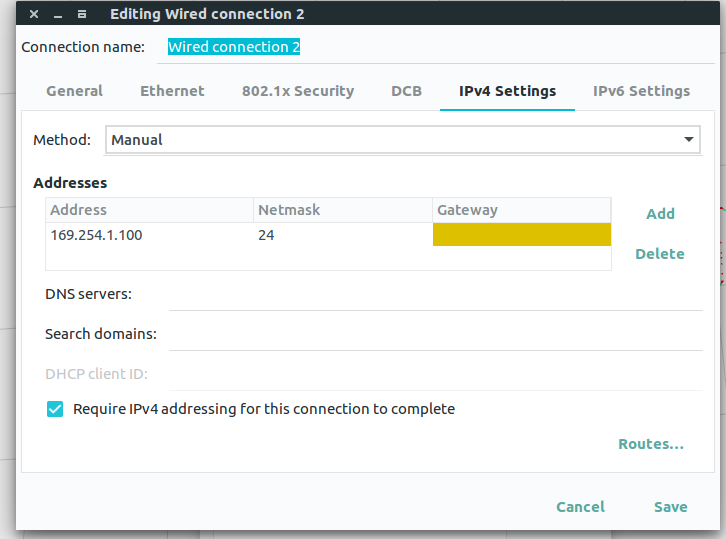
3.安装ros驱包pavo_ros
#ros_rslidar需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src git clone https://github.com/BluewhaleRobot/pavo_ros.git #tof雷达会有拖尾现象,需要用laser_filters包进行过滤 git clone https://github.com/BluewhaleRobot/laser_filters.git cd .. catkin_make4.将雷达接入电源,同时用网线连接ros主机,启动ros驱动launch文件
roslaunch pavo_ros xiaoqiang.launch #启动成功后,驱动节点默认会发布10hz的点云话题/scan,这个话题的frame_id是laser,上面的launch文件也发布了base_link到laser的tf关系,请根据实际安装参数进行调整。6.在rviz中显示发布的点云数据
roscd pavo_ros/rviz rviz -d pavo_xiaoqiang.rviz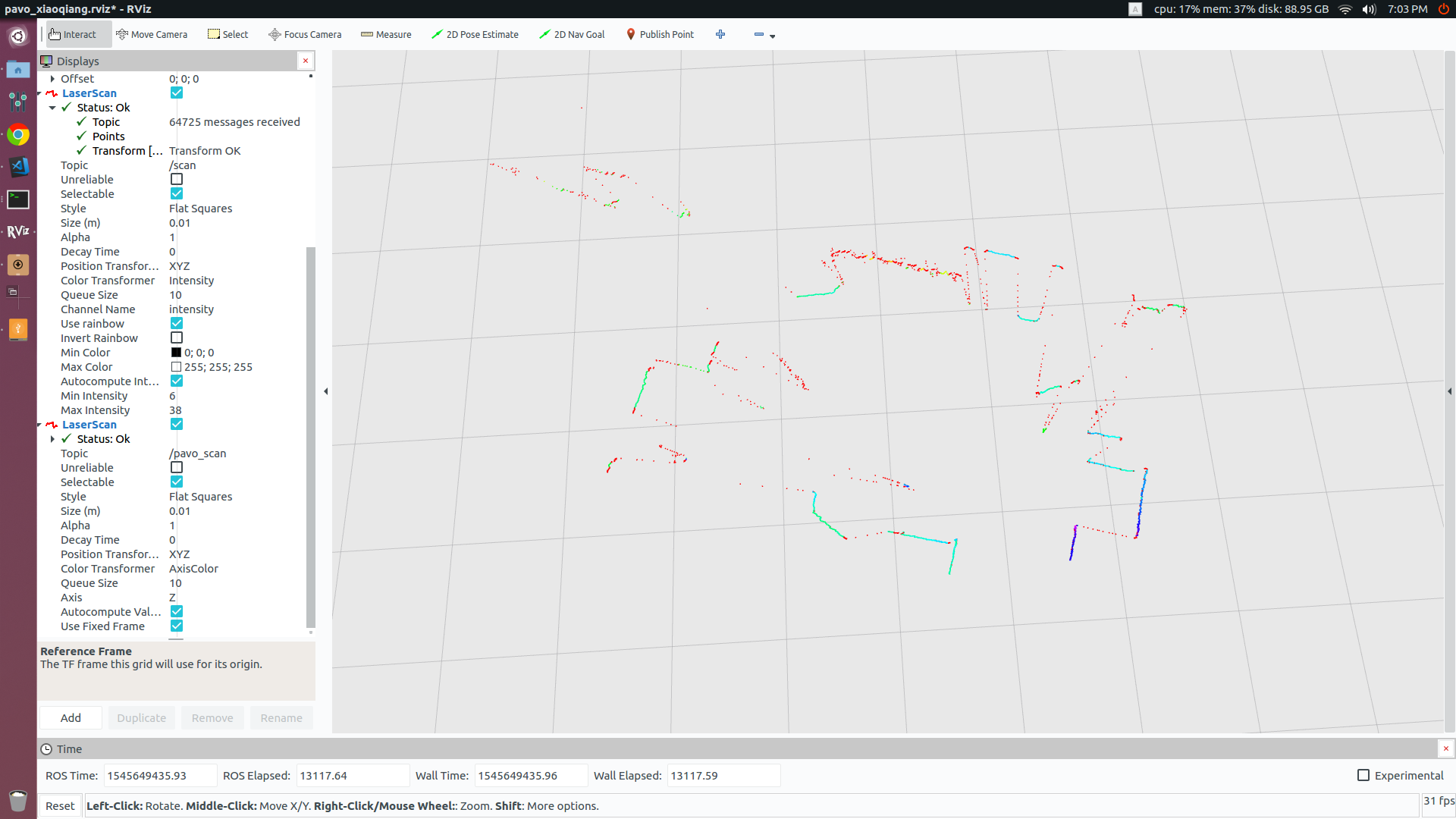
在rviz里面可以对比原始数据/pavo_scan和过滤处理后的数据/scan的区别。 -
LZ觉得这款雷达怎么样,性价比方面
-
@subiluo 最高性价比
-
@xiaoqiang 哈哈哈,不过我目前不敢长时间用0.08分辨率,用的四合一了