ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
使用pointcloud_to_laserscan包将北科天绘3d激光雷达转换成高质量2d激光雷达
-
北科天绘16线激光雷达R-Fans-16的ros驱动安装与rviz点云显示,这篇教程安装的ROS驱动已经把R-Fans-16雷达变成了和速腾聚创3D雷达一样的设备,因此雷达数据处理教程、建图教程都可以完全通用,只用把雷达驱动launch文件启动命令替换成启动R-Fans-16的命令即可。
#把速腾聚创雷达的驱动启动命令换成北科天绘的即可 roslaunch rslidar_pointcloud xiaoqiang_lungu.launch #这是速腾聚创的启动命令 roslaunch rfans_driver xiaoqiang_lungu.launch #这是北科天绘的启动命令因此,根据使用pointcloud_to_laserscan包将速腾聚创3d激光雷达转换成高质量2d激光雷达,我们只需要启动北科天绘的雷达驱动,然后再执行速腾聚创的转换节点即可
#新开一个终端,启动3d雷达驱动 roslaunch rfans_driver xiaoqiang_lungu.launch #新开一个终端,启动pointcloud_to_laserscan节点 roslaunch pointcloud_to_laserscan xiaoqiang_rslidar.launch正常的话,现在就可以获取10hz的laserscan类型话题数据了,数据发布在/rslidar/scan话题上
在RVIZ里面也一样的查看数据
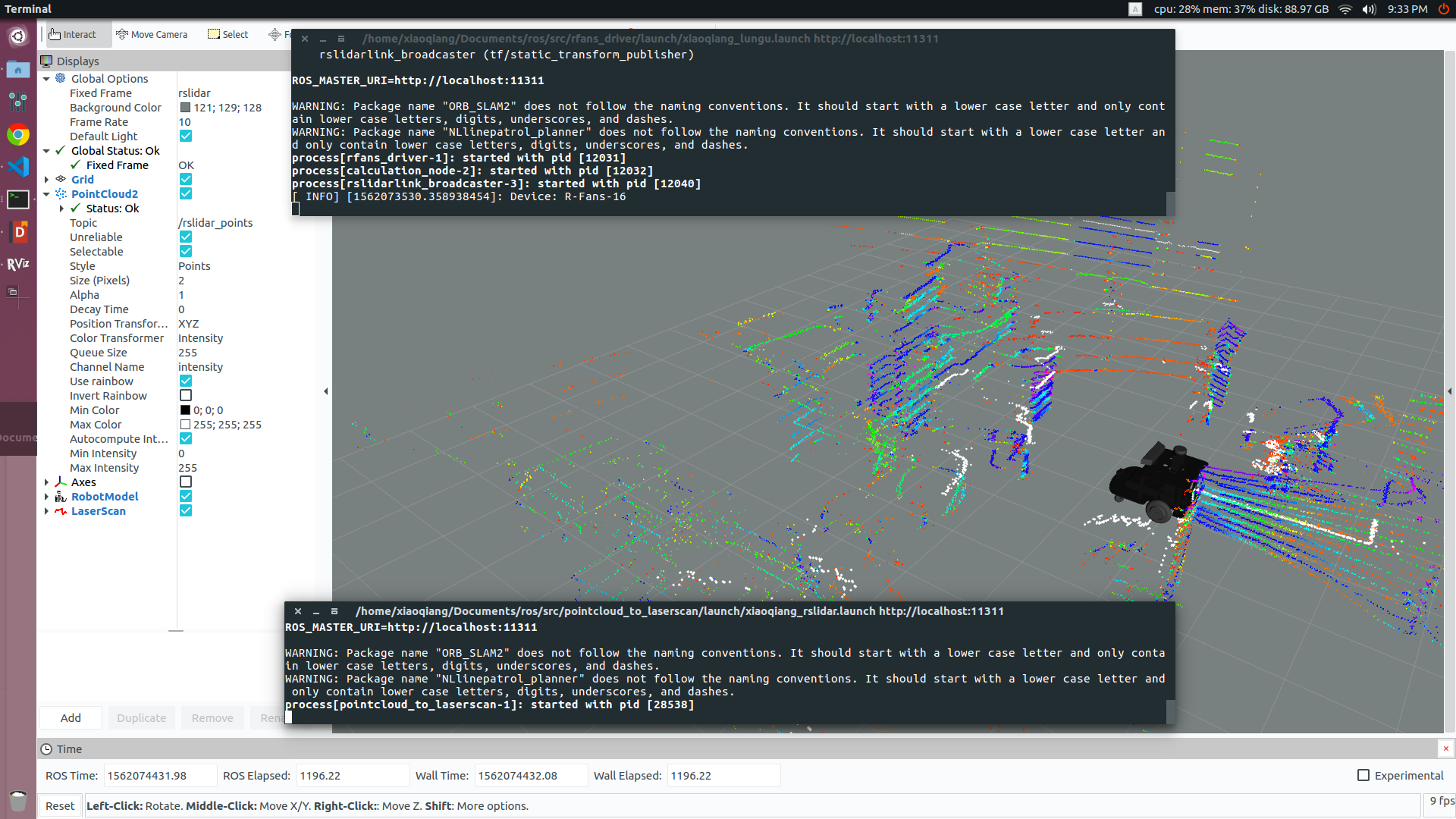
上图白线就是对应转换完成的scan数据