ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
TF雷达在飞控F4上的应用
-
一、文档说明
气压计作为目前飞控高度测量的主要传感元器件,虽然满足大多数时候的定高需
要,但是精度差强人意,尤其是在高级飞行中,例如自动化起飞和着陆很难确保气压数据的准确性,为了实现高精度的测距定高(地形模式),辅助自动起飞降落(尤其是固定翼飞机),以及诸如避障等功能,可采用TF雷达连接F4使用。
本文档将介绍如何使用TF雷达与F4建立通讯。
TF雷达将作为测距仪,在F4的声呐传感器选项中显示出来。二、设备和接线说明
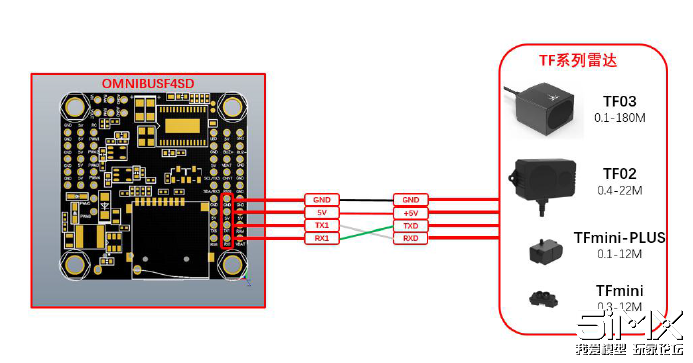
TF系列雷达有TF03、TF02、TFmini-Plus、TFmini,它们都拥有UART接口的版本,可以直接与F4焊接相连,需要占用F4的一个UART接口。接线时,注意线序对应TX-RX,RX-TX。
以OMNIBUSF4 SD为例,占用UART1接口,设备接线线序如下图。
三、地面站和F4固件说明
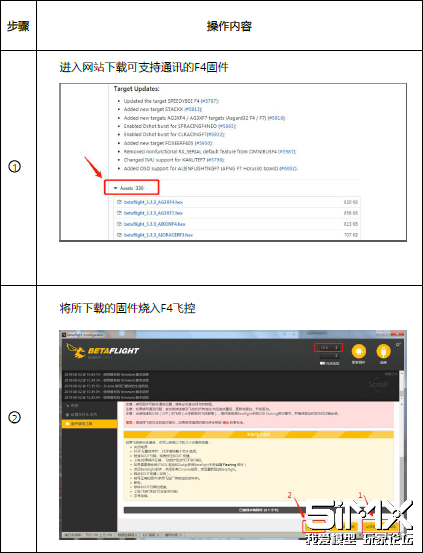
TF雷达与F4建立通讯需要借助地面站进行配置,并且烧入对应可支持通讯的F4固件版本。此次介绍三个常用地面站进行演示,分别为:“Betaflight”、“Cleanflight”和“Inavflight”。
为了保证功能的齐全,请使用最新版本的地面站。四、Betaflight 和 Cleanflight 地面站的调试
BF 和 CF 两个地面站的调试步骤一致,所以此次以 BF 调试为例,所用F4飞控型号为OMNIBUSF4 SD。
调试步骤如下:

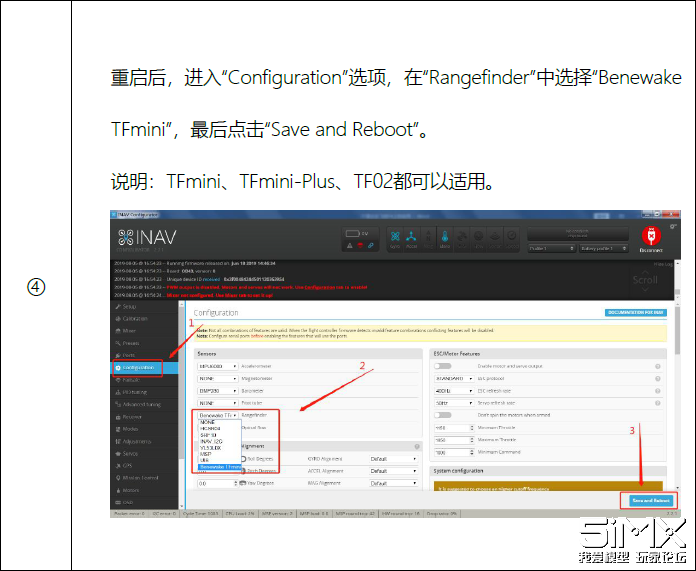
五、Inavflight 地面站的调试
地面站:INAV。所用F4飞控型号为OMNIBUSF4 V3。
调试步骤如下:




六、注意事项
①TF雷达应是出厂默认的串口模式
②F4飞控端的串口应不被接收机等其他外设占用
③F4飞控应水平放置,否则会出现“-1”值
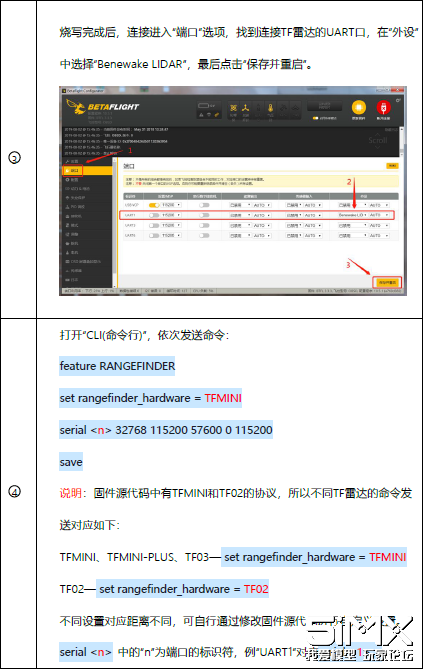
④BF和CF源码中,有“TFMINI”和“TF02”两种协议,

⑤TF03不能在INAV中适用最后,有意者请联系:010-57456983
www.benewake.com
北醒(北京)光子科技有限公司
北醒激光雷达
电话:010-5745 6983
邮箱:bw@benewake.com