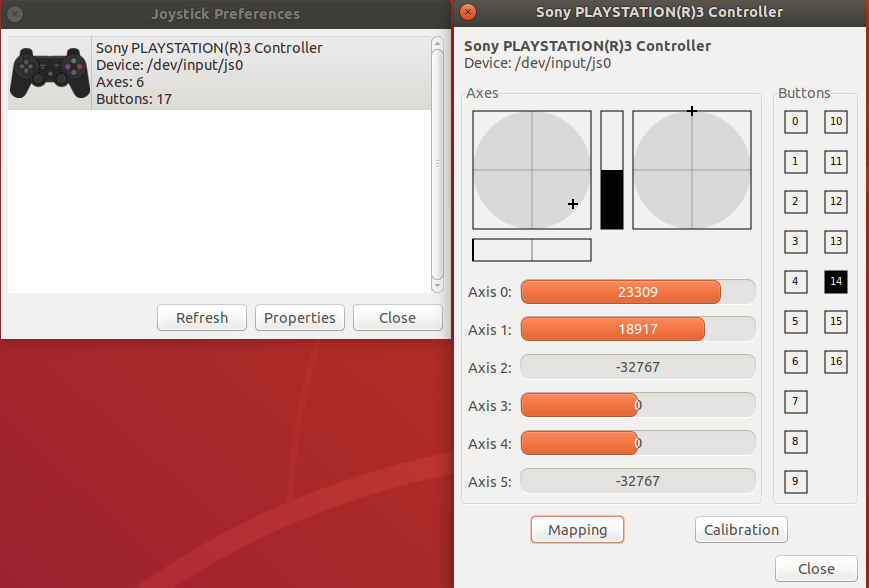
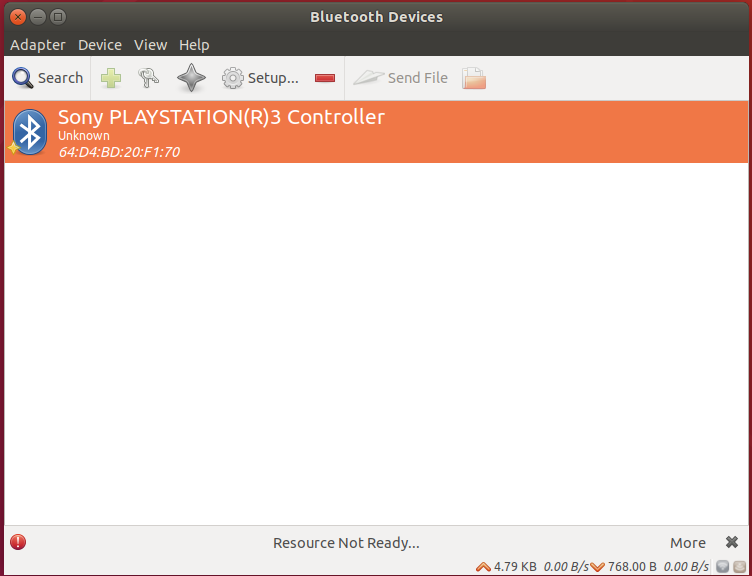
@xiaoqiang 完全没有其他蓝牙连接,我用sixad连接:
sixad -s
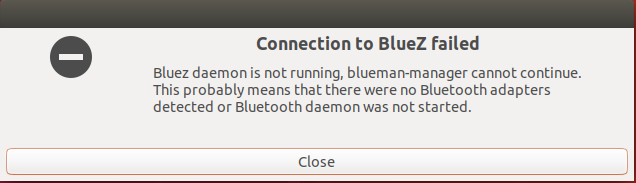
Can’t read version info hci0: Connection timed out (110)
Can’t set scan mode on hci0: Connection timed out (110)
是不是因为蓝牙的问题,购买的蓝牙不同版本使得在Ubuntu 18.04上不好使?
rfkill list
0: hci0: Bluetooth
Soft blocked: no
Hard blocked: no
dmesg | grep Bluetooth
[ 21.196279] Bluetooth: Core ver 2.22
[ 21.196295] Bluetooth: HCI device and connection manager initialized
[ 21.196300] Bluetooth: HCI socket layer initialized
[ 21.196302] Bluetooth: L2CAP socket layer initialized
[ 21.196304] Bluetooth: SCO socket layer initialized
[ 45.252264] Bluetooth: BNEP (Ethernet Emulation) ver 1.3
[ 45.252267] Bluetooth: BNEP filters: protocol multicast
[ 45.252276] Bluetooth: BNEP socket layer initialized
[ 45.268452] Bluetooth: RFCOMM TTY layer initialized
[ 45.268462] Bluetooth: RFCOMM socket layer initialized
[ 45.268469] Bluetooth: RFCOMM ver 1.11
[ 161.085862] Bluetooth: hci0: command 0x0c1a tx timeout
[ 330.974016] Bluetooth: hci0: command 0x0c52 tx timeout
[ 887.742238] Bluetooth: hci0: command 0x0c1a tx timeout
[ 889.758240] Bluetooth: hci0: command 0x0c13 tx timeout
[ 891.774231] Bluetooth: hci0: command 0x0c52 tx timeout
[ 912.510248] Bluetooth: hci0: command 0x0c1a tx timeout
[ 914.526244] Bluetooth: hci0: command 0x0c13 tx timeout