@xiaoqiang 我想写在功能包的cpp里面,在cpp里面可以用rostopic list 吗?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
叫我小冬枣 发布的最新帖子
-
求助,ROS如何编写判断节点启动的程序。发布在 ROS教程
如题,我想编写一个一旦/turtlesim节点启动的话,我的发布者程序就会向语音话题发布一个表示开始的消息,然后就会发出声音,我需要写一个if
while(…)
{
#初始化消息
…
if(节点启动)
{
发布消息;
}
}
这其中的表示节点启动的语句具体应该怎么写,是节点名+上什么才能让计算机做出节点启动的判断?
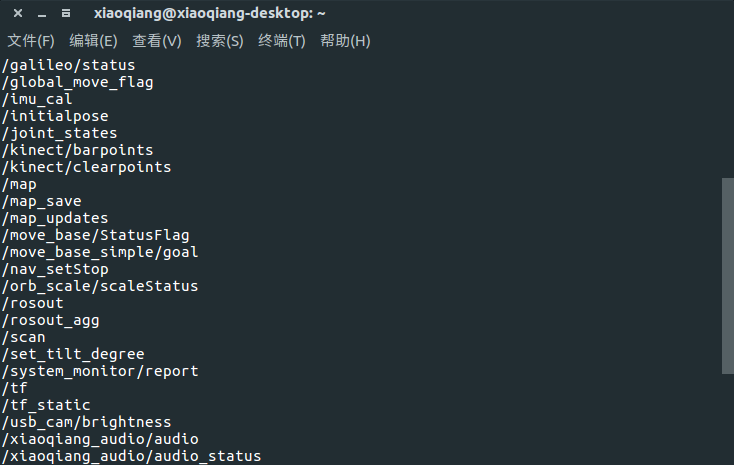
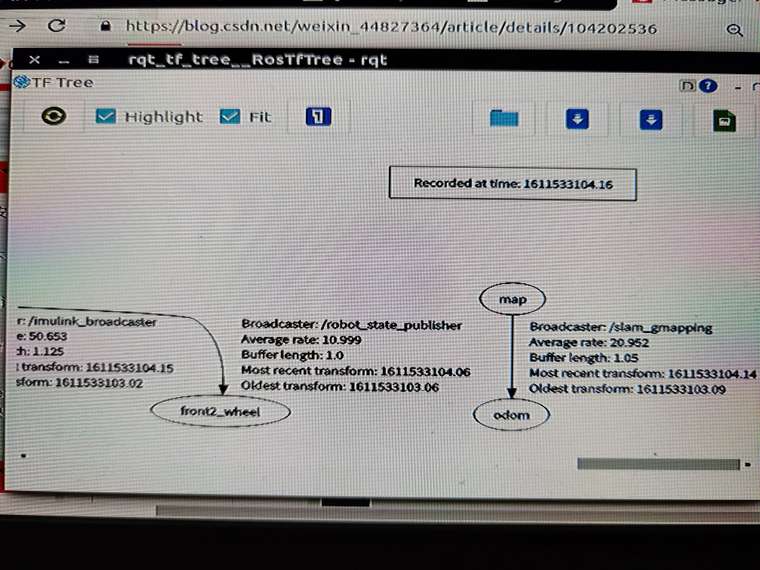
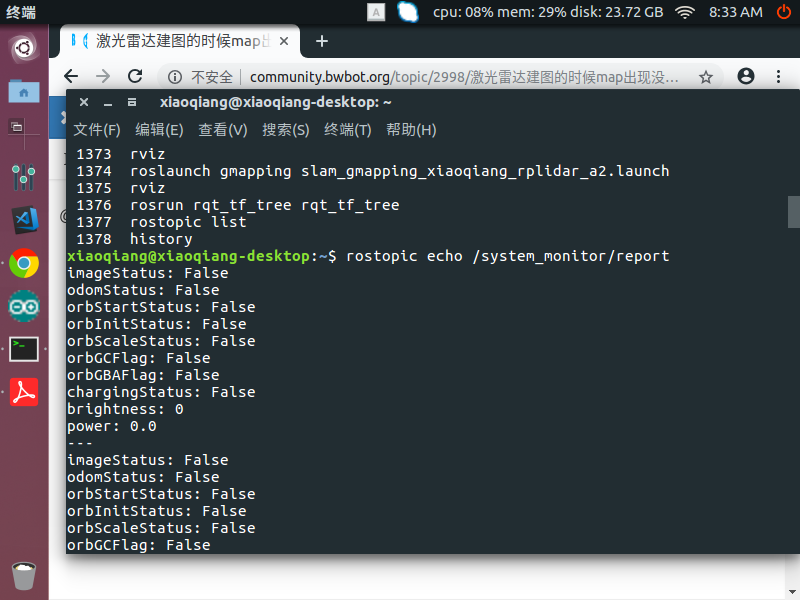 并且查看这两个命令的时候显示的是这样子的
并且查看这两个命令的时候显示的是这样子的