@xiaoqiang 除了用镜像就没有其他办法了嘛
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
fly19955736 发布的帖子
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
@xiaoqiang 第一条已经执行过了,后面那个已经把您给的链接文件下载下来了,不知道该怎么用这个文件呢,lsusb后可以查看到VID PID,但是就是连接不上设备
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
在运行robot_arm/move.py时,出现了无法打开device 的问题,如图所示:
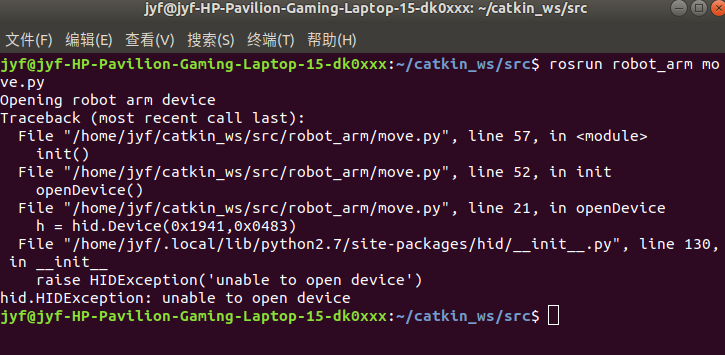
怎么解决?hid已经装过了,VID、PID已经改过了,没有问题,到底怎么解决呢,求助