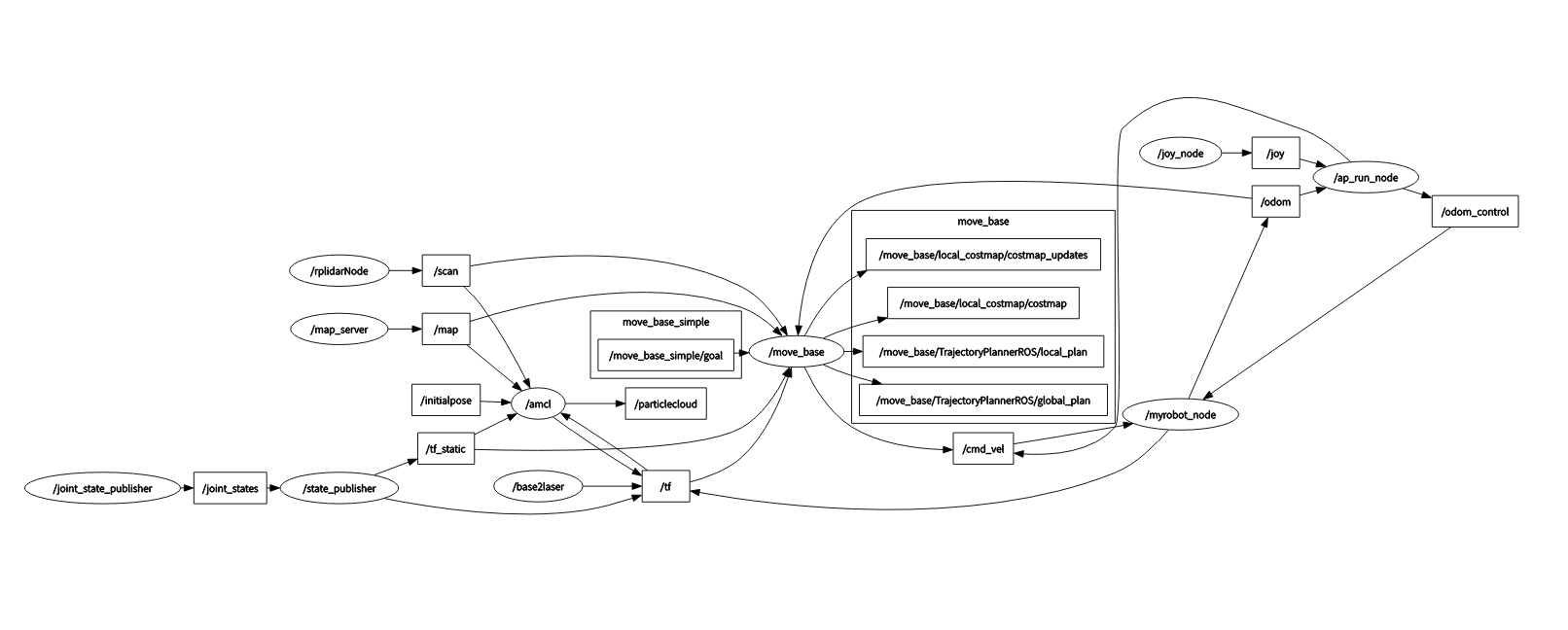
这个是节点运行的图
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Jinhelu 发布的帖子
-
RE: 移动机器人导航过程中move_base发布速度命令问题发布在 技术交流
@weijiz 数据是move_base发布的,我看过节点图了,至于tf的话,可否请您讲的详细一点呢,我设置了laser到baselink的静态坐标变换,然后是robot_state_publisher发布的tf,以及里程计odom坐标系到base_footprint.
-
RE: 移动机器人导航过程中move_base发布速度命令问题发布在 技术交流
@Jinhelu 在 移动机器人导航过程中move_base发布速度命令问题 中说:
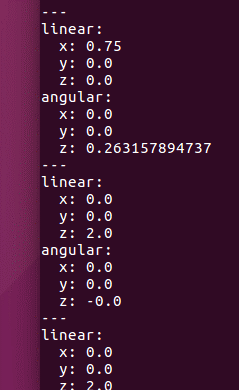
在使用move_base完成路径规划之后,给双轮机器人发布速度命令,查看cmd_vel话题信息,发现发布的速度命令有错误,在一个正确命令之后会发布很多错误的速度命令。
错误命令除了linear.z的值恒为2,其余值都为0,如下图:
1.png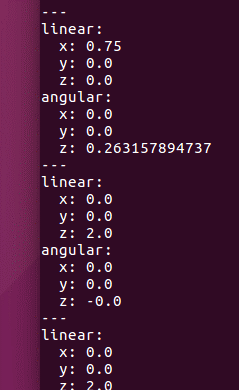
-
移动机器人导航过程中move_base发布速度命令问题发布在 技术交流
在使用move_base完成路径规划之后,给双轮机器人发布速度命令,查看cmd_vel话题信息,发现发布的速度命令有错误,在一个正确命令之后会发布很多错误的速度命令。
错误命令除了linear.z的值恒为2,其余值都为0,如下图:
1.png
{kind=link}