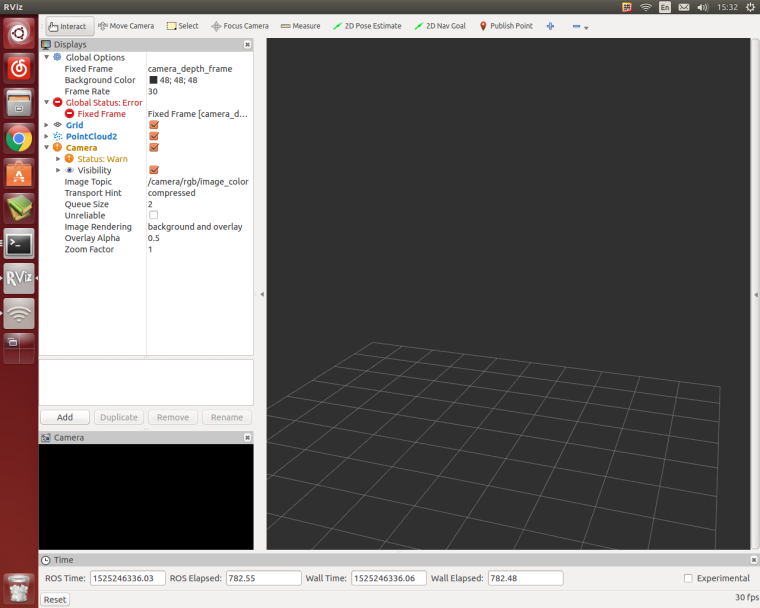
@weijiz 我试了几次,都是没有数据发布,rviz中倒是没有出现什么异常的显示,如果要校正坐标系,应该如何校正
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
laijin 发布的最新帖子
-
roscore发布在 技术交流
自从上次使用完后,机器人系统运行roscore就会报错,说已经启动了roscore,然后我kill了全部roscore,还是会报错
roscore cannot run as another roscore/master is already running.
Please kill other roscore/master processes before relaunching.
The ROS_MASTER_URI is http://xiaoqiang-desktop:11311/
The traceback for the exception was written to the log file
请问大神们如何解决这个问题
 显示的就是这样的,前辈知道是怎么回事吗
显示的就是这样的,前辈知道是怎么回事吗