@weijiz 重新安装编译了你给的软件包,rviz打开还是三个轮子啊?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小瘪二 发布的帖子
-
RE: xq4pro 的rviz模型发布在 讨论区
@weijiz 从github上下载小强最新的模型,catkin_make有问题。
Cmake error: the following variables are used in this project, but they are set to NOTFOUND. Please set them or make sure they are set and tested correctly in the Cmake files: DSO_LIBRARY Linked by target “Dso_live” in directory.
-
小强镜像同局域网下登录主机发布在 技术交流
1.无法关闭startup service。显示unit startup.service not loaded.
2.无法ssh到小强主机(网路已设置桥接,电脑防火墙已关闭,小强电源连接且开机状态)
-
RE: 新手求教关于重新注册startup service 以及 display.launch 的问题发布在 讨论区
enable programmable completion features (you don’t need to enable
this, if it’s already enabled in /etc/bash.bashrc and /etc/profile
sources /etc/bash.bashrc).
if ! shopt -oq posix; then
if [ -f /usr/share/bash-completion/bash_completion ]; then
. /usr/share/bash-completion/bash_completion
elif [ -f /etc/bash_completion ]; then
. /etc/bash_completion
fi
fi
source /opt/ros/kinetic/setup.bash
source /home/xiaoqiang/Documents/ros/devel/setup.bash
export PATH=/home/xiaoqiang/Documents/xiaoqiang-cmds:$PATH
alias sudo=‘sudo env PATH=$PATH’
ulimit -c unlimited
source /opt/ros/kinetic/setup.bash
-
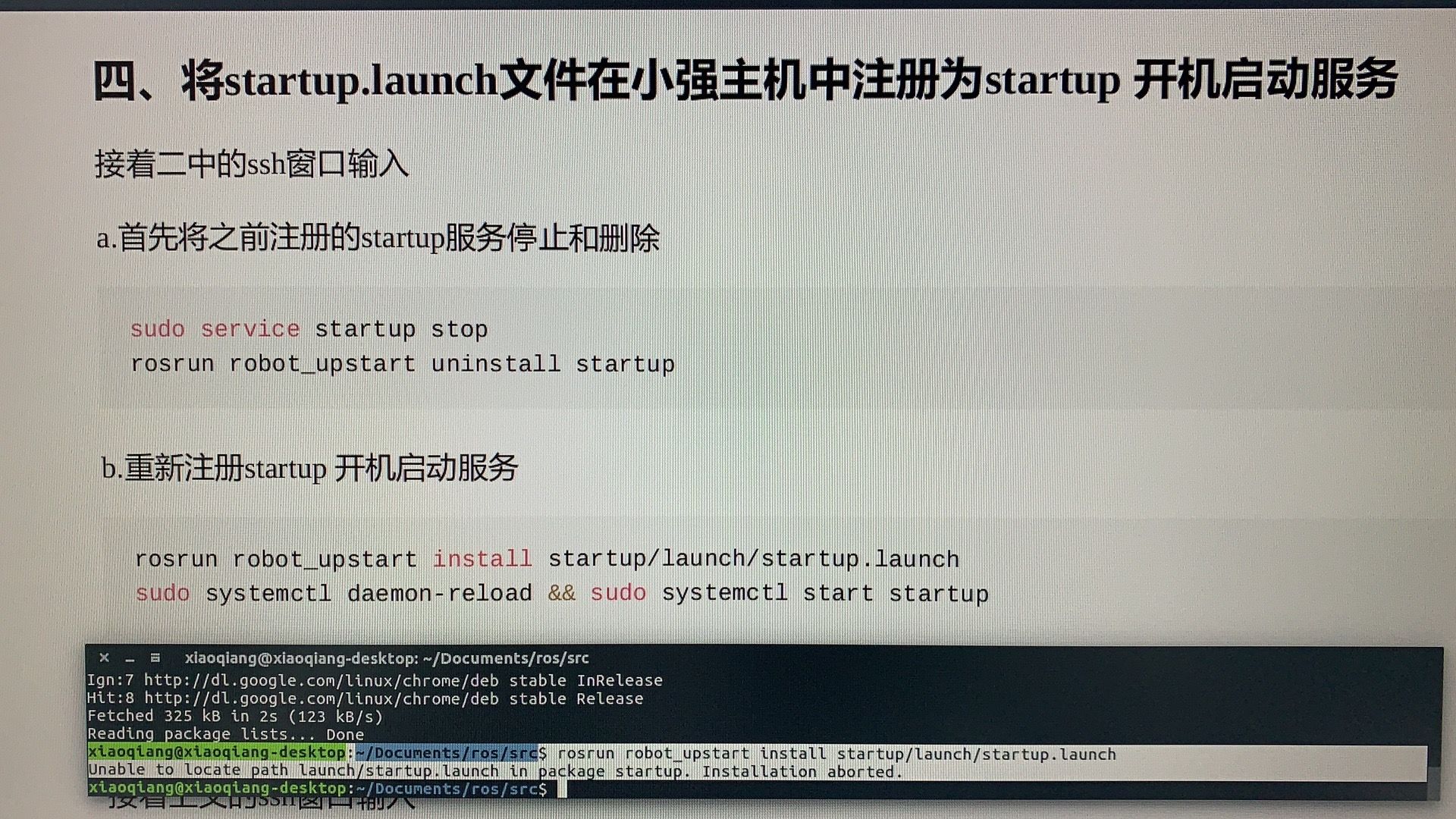
新手求教关于重新注册startup service 以及 display.launch 的问题发布在 讨论区
(1)
(2)xiaoqiang@xiaoqiang-desktop:~$ roslaunch xiaoqiang_udrf display.launch
[display.launch] is neither a launch file in package [xiaoqiang_udrf] nor is [xiaoqiang_udrf] a launch file name
The traceback for the exception was written to the log file