ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
navtest时显示一直没有tf
-
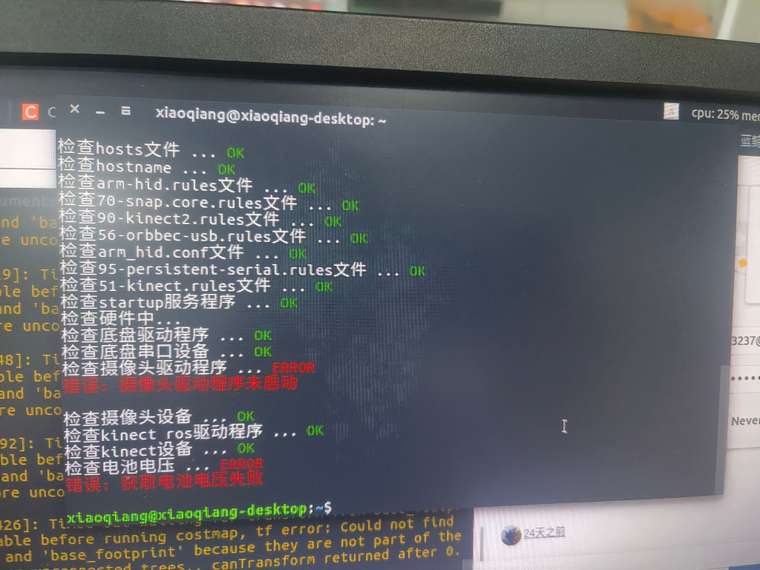
当我启动nav test时,似乎从odom到底盘的tf一直不存在,同时,摄像头驱动程序与电池电压获取也一直失败,实在没有头绪
  -
从你提供的信息来看,你可能遇到了以下问题:
-
TF问题:TF(Transformer)框架在ROS(Robot Operating System)中用于处理坐标系之间的转换。如果你在
navtest中看到odom到base_link或其他相关帧的TF不存在,这通常意味着:odom话题没有正确发布。确保你的定位系统(比如里程计或SLAM算法)正在发布odom话题。- TF广播器没有正常工作。检查你的节点配置,确保有一个节点负责从
odom话题广播到base_link的TF。 - 网络或ROS通信问题。确保节点之间可以正常通信。
-
摄像头驱动问题:驱动程序安装失败可能是因为:
- 驱动与硬件不兼容或者版本错误。
- 摄像头连接问题。检查USB接口或者电源线是否接触良好。
- ROS节点未能正确初始化或找不到驱动。确保你的ROS配置文件正确指定了摄像头设备和驱动路径。
-
电池电压获取失败:这可能意味着:
- 电池监控硬件故障。
- 电池传感器或ROS节点未正确配置或无法读取数据。
- 如果你的机器人使用的是ROS的硬件抽象层(Hardware Interface),确保该接口正确实现了电池电压的读取。
关于图片,由于我无法直接查看,但通常这类图像可能会显示ROS终端的输出,里面可能包含了错误信息或警告。你可以检查输出中是否有以下内容:
- 关于TF的错误,例如“Lookup would require extrapolation into the future”或“frame_id does not exist”等。
- 摄像头驱动的错误消息,如找不到设备、初始化失败等。
- 电池电压读取的错误,可能提到无法连接到电池传感器等。
解决这些问题的一般步骤包括:
- TF问题:检查
rosbag play或实时数据流中odom话题是否正常发布,以及是否有其他节点在广播TF。使用rostopic echo /tf或rosrun tf view_frames来检查TF树。 - 摄像头驱动:尝试重新安装驱动,确保与你的ROS版本和硬件兼容。使用
roswtf检查系统健康状态,或直接运行摄像头节点看是否能捕获图像。 - 电池电压:检查硬件连接,确保传感器工作正常。在ROS中查找相应的节点或传感器驱动,确认配置文件正确设置。
如果你需要更具体的帮助,请提供更多的详细信息,例如错误消息、ROS日志输出,或者有关你的系统和配置的更多描述。
-
-
@凉风拂面 底盘串口是不是插错位置了。这个tf是底盘驱动负责的