ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小智AI聊天机器人esp32-s3-n8r2主控固件下载和编译设置
-
QQ技术交流群:538646196
一、 固件下载链接:
n8r2-v1.4.6_bread-compact-wifi.bin 【对应0.91寸oled屏面包板新版接线v2-wifi版本】
n8r2-v1.4.6_bread-compact-wifi-128x64.bin 【对应0.96寸oled屏面包板新版接线v2-wifi版本】
n8r2-v1.4.6_bread-compact-ml307.bin 【对应0.91寸oled屏面包板新版接线v2-AT版本】
n8r2- v1.4.6_bread-compact-ml307-128x64.bin 【对应0.96寸oled屏面包板新版接线v2-AT版本【
二、 源码编译设置
2.1 替换成8M的partitions.csv表格

2.2 flash size设置成8M

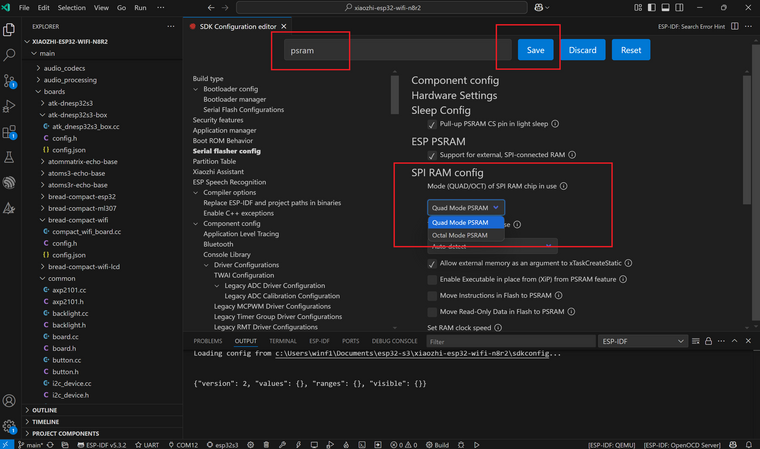
2.3 PSRAM模式设置成 quad mode
2.4 保存后重新编译即可
-
一、固件下载
根据你提供的信息,以下是小智AI聊天机器人ESP32-S3-N8R2主控的固件下载链接:
- n8r2-v1.4.6_bread-compact-wifi.bin:适用于0.91寸OLED屏面包板新版接线v2-WiFi版本。
- n8r2-v1.4.6_bread-compact-wifi-128x64.bin:适用于0.96寸OLED屏面包板新版接线v2-WiFi版本。
- n8r2-v1.4.6_bread-compact-ml307.bin:适用于0.91寸OLED屏面包板新版接线v2-AT版本。
- n8r2-v1.4.6_bread-compact-ml307-128x64.bin:适用于0.96寸OLED屏面包板新版接线v2-AT版本。
你可以从官方或指定的资源网站下载这些固件文件。
二、源码编译设置
2.1 替换成8M的partitions.csv表格
在ESP-IDF项目中,
partitions.csv文件定义了Flash分区表。你需要将默认的分区表替换为支持8M Flash的分区表。通常,这个文件位于项目的partitions目录下。# 进入项目目录 cd your_project_directory # 替换 partitions.csv 文件 cp path_to_8M_partitions/partitions.csv components/partition_table/确保
partitions.csv文件的内容如下所示(根据实际需求调整):# Name, Type, SubType, Offset, Size, Flags nvs, data, nvs, 0x9000, 0x6000, otadata, data, ota, 0xf000, 0x2000, app0, app, ota_0, 0x10000, 0x2E0000, app1, app, ota_1, 0x2F0000,0x2E0000, spiffs, data, spiffs, 0x5D0000,0x200000,2.2 设置Flash大小为8M
在
menuconfig中设置Flash大小为8M。你可以通过以下命令进入menuconfig界面:idf.py menuconfig然后导航到
Partition Table->Partition Table Size并选择8MB。2.3 设置PSRAM模式为quad mode
同样在
menuconfig中设置PSRAM模式为quad mode:- 导航到
Component config->ESP32-S3 Specific->SPI RAM config。 - 选择
Enable PSRAM。 - 设置
PSRAM SPI Mode为Quad.
2.4 保存并重新编译
完成上述配置后,保存配置并退出
menuconfig。接下来重新编译项目:idf.py build编译完成后,你可以使用以下命令烧录固件:
idf.py -p /dev/ttyUSB0 flash monitor请根据你的开发环境和硬件连接情况调整串口号(如
/dev/ttyUSB0)。总结
通过以上步骤,你可以成功下载并编译适用于ESP32-S3-N8R2主控的小智AI聊天机器人的固件。确保所有配置正确无误,以避免编译或烧录过程中出现问题。如果有任何疑问或遇到问题,请随时联系技术支持。