ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
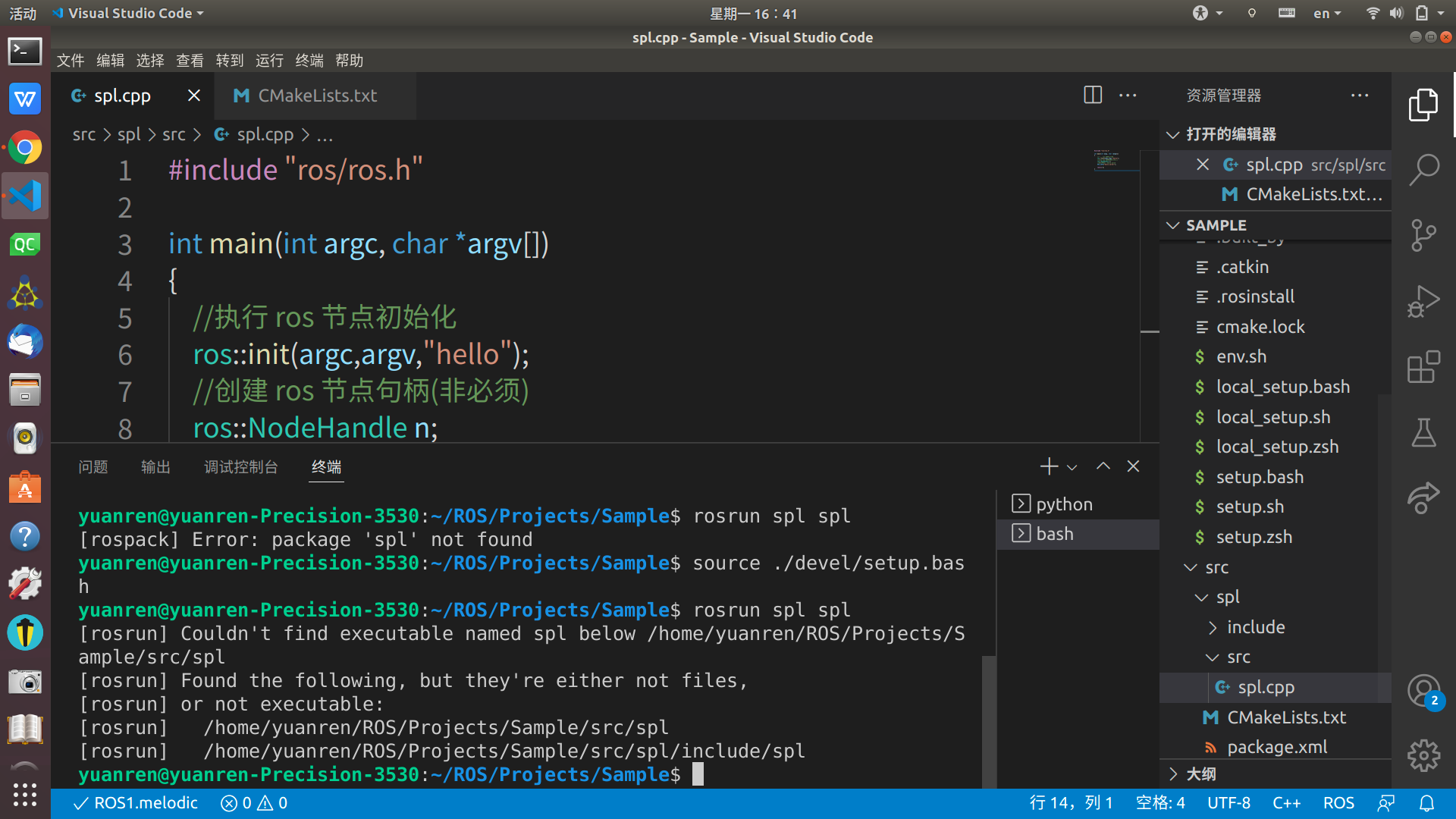
求助!ros编译后提示未找到可执行文件
-
最简单的例程,编译后出现如下错误。其它功能包也是如此。
-
-
@yuanren 烦请高手帮忙
-
@yuanren
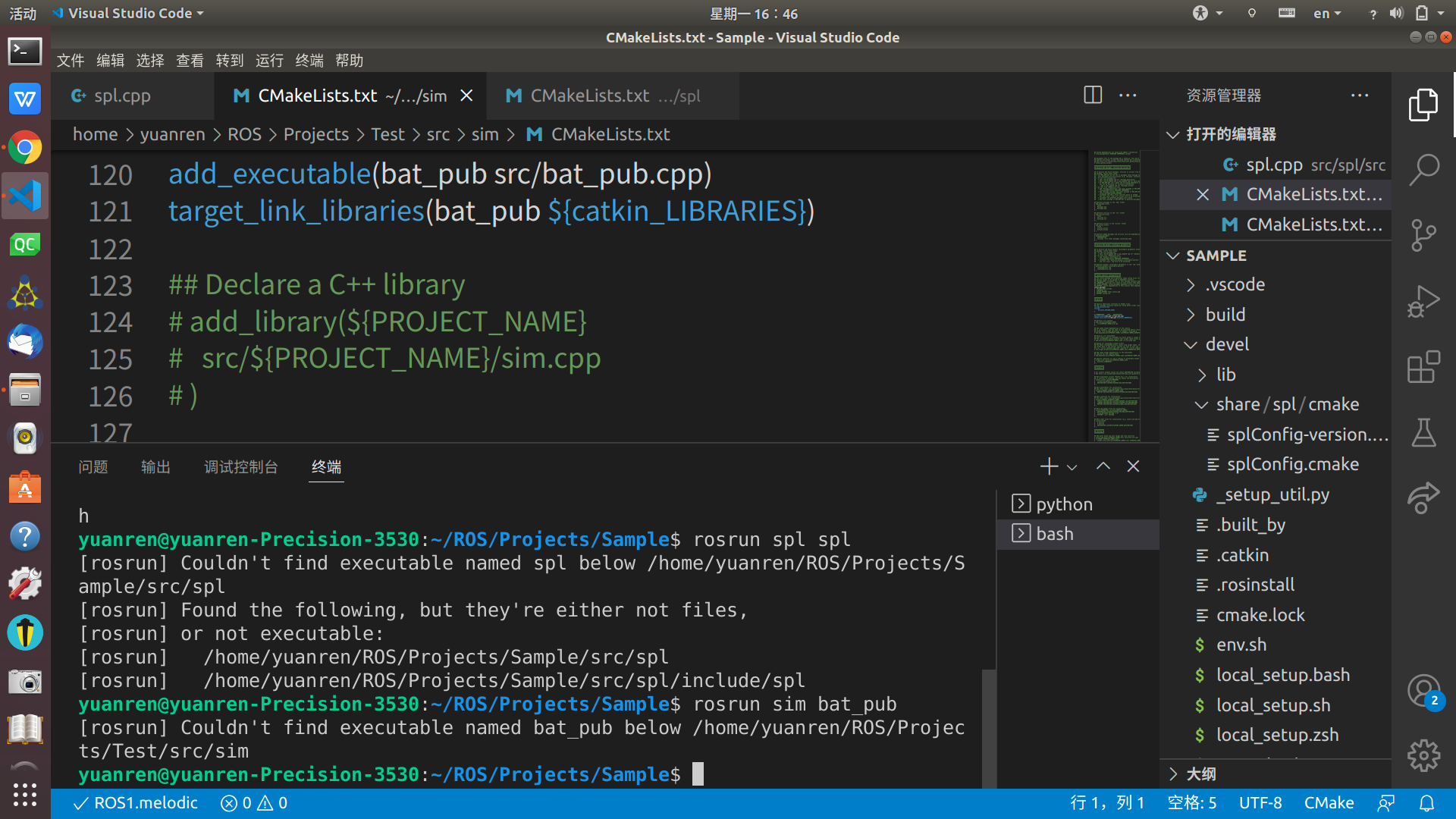
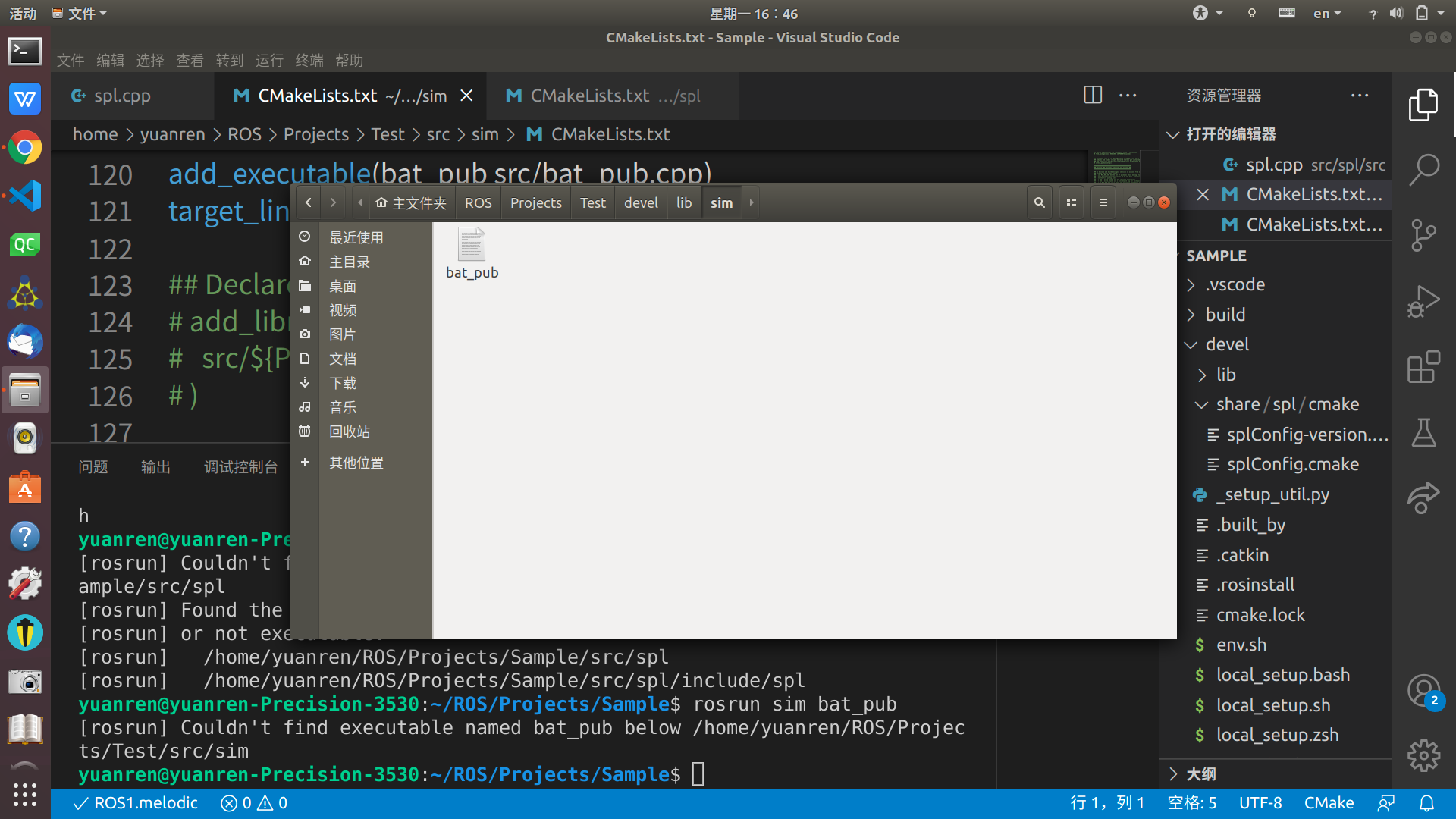
这是另一个,但devel里面已有内容,却无法执行
-
@yuanren ROS的工作空间环境变量是不是没有设置。有没有souce工作空间的setup.bash
-
@weijiz 你好,我source了,还是出现这个情况。
-
@weijiz 这是我的CMakelist,麻烦你帮我看一下。不知道是不是我Ubuntu系统的问题,昨天运行还可以。
cmake_minimum_required(VERSION 3.0.2)
project(sim)Compile as C++11, supported in ROS Kinetic and newer
add_compile_options(-std=c++11)
Find catkin macros and libraries
if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)catkin_package(
INCLUDE_DIRS include
LIBRARIES sim
CATKIN_DEPENDS roscpp rospy std_msgs
DEPENDS system_lib
)
Specify additional locations of header files
Your package locations should be listed before other locations
include_directories(
include
${catkin_INCLUDE_DIRS}
)catkin_package()
add_executable(bat_pub
src/bat_pub.cpp
)
target_link_libraries(bat_pub
${catkin_LIBRARIES}
)add_executable(tst
src/tst.cpp
)
target_link_libraries(tst
${catkin_LIBRARIES}
) -
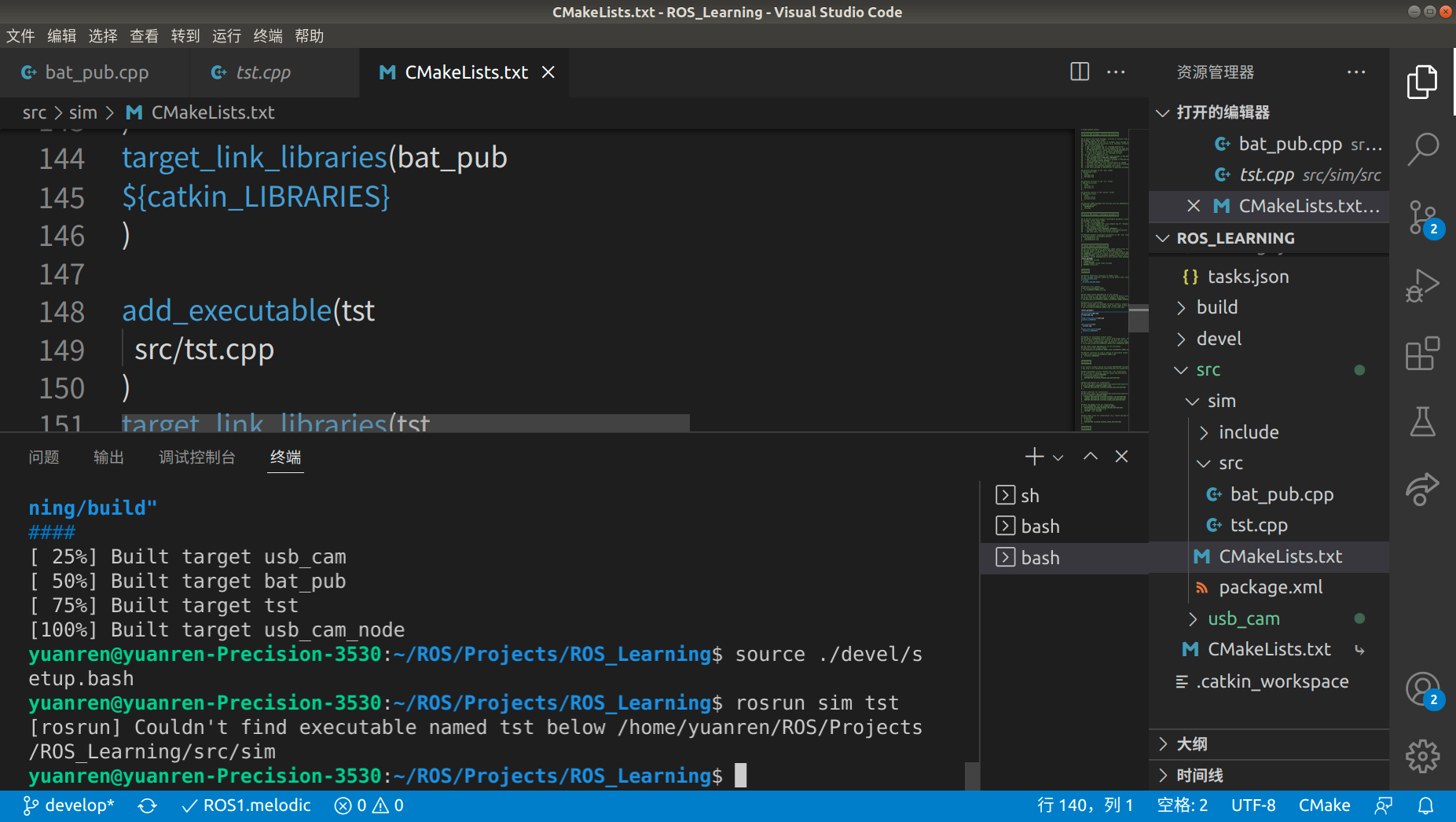
@yuanren 你的工作空间太乱了,可能source了错误的工作空间
-
@weijiz 好的