ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
电机控制与缓动函数
-
问题
在机器人的控制中最最基本的就是电机的控制。以舵机为例,最简单的控制方法就是直接给想要控制的舵机发送目标角度。但是我们实际会发现这样会有很多问题。比如舵机的动作速度没办法控制。动作看起来非常的生硬,直来直去。这样的控制也会比较影响舵机的使用寿命。这样就会出现一个问题,如何能够流畅的控制电机呢?
首先什么样的动作才叫做流畅呢?
同样是左右来回运动的两个方块,第二块的运动方式就要比第一块流畅许多。第一块只是一恒定大小的速度在运动,在两个边缘处的速度是突变的。这样对电机的伤害就很大。第二块的运动包含了加速和减速的过程,整过过程总电机的力相对要更均匀些。
如何选取缓动函数
现在我们已经知道了应该在运动中加入适当的过渡变化。那么如何选取合适的过度函数呢?
这里实际上可以考虑成一个常见的物理运动过程。比如一个有阻尼的弹簧振子的运动。
根据阻尼大小的不同可以分为欠阻尼,过阻尼和临界阻尼三种状态。这些状态都运动特点如下图所示
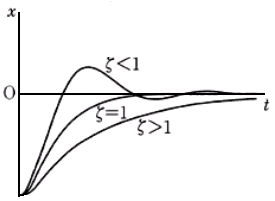
假如我们想要把一个运动的电机停下来。按照阻尼运动来进行控制就是一个比较好的方式。但是在实际开发过程中,我们肯定不能直接使用上图的这种运动方程,因为算起来会比较复杂。在计算机绘图程序中经常使用贝塞尔函数来绘制平滑的曲线。利用这个函数就可以近似的模拟出以上的几个运动方程。
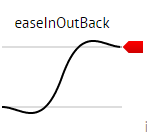
比如欠阻尼的情况
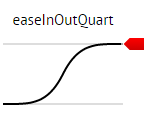
又比如过阻尼的情况
具体怎么实现呢
这个具体的实现过程和一般程序的动画控制函数差不多。下面以java为例来分析具体应该如何实现。
一半的动画函数都包含以下几个参数,初始值, 结束值,时间函数(这个就是用来控制变化曲线的),更新函数。下面是我的codepublic static ActionStatusController actionAnimation(final int start, final int end, final int duration, final AnimationTimeFunction timeFunction, final AnimationHandler controlFunction){ final ThreadUtils mAnimationThread = new ThreadUtils(new OnThreadStartHandler(){ @Override public void OnStart() { super.OnStart(); int changes = end - start; int time = 0; while (time < duration){ controlFunction.onProgress((int)(start + changes * timeFunction.getInterpolation((float)time/duration))); try{ Thread.sleep(40); time += 40; }catch (Exception e){ e.printStackTrace(); break; //action was canceled } } } }); ActionStatusController mController = new ActionStatusController(mAnimationThread); return mController; }每次根据时间算出变化量,然后再把变化量传入到更新函数里面去进行具体的操作。
因为一个动作可能包含了一些列电机的很多行为,所以为了使用方便可以包装出一个动作控制类。package com.novelor.servicebot.servicebot.models; import android.util.Log; import com.novelor.servicebot.servicebot.callbacks.OnThreadStartHandler; import com.novelor.servicebot.servicebot.utils.ArrayUtils; import com.novelor.servicebot.servicebot.utils.ThreadUtils; import java.util.Collection; /** * Created by randoms on 2015/10/23. */ public class ActionStatusController { private ThreadUtils mAction; private boolean startFlag = false; public boolean isFinished(){ return !mAction.isAlive(); } public ActionStatusController (ThreadUtils mAction){ this.mAction = mAction; } public void start(){ startFlag = true; mAction.start(); } public void cancel(){ this.mAction.interrupt(); } public ActionStatusController then(ActionStatusController next){ while (!isFinished() || !startFlag){ try{ Thread.sleep(5); }catch (Exception e){e.printStackTrace();} } next.start(); return next; } public ActionStatusController then(ActionStatusController[] nexts){ Log.d("Bot", "here1"); while (!isFinished() || !startFlag){ try{ Thread.sleep(5); }catch (Exception e){e.printStackTrace();} } Log.d("Bot", "here2"); for(int i = 0;i<nexts.length;i++){ nexts[i].start(); } // wait all actions to finish for(int i=0;i<nexts.length;i++){ while (!nexts[i].isFinished() || !nexts[i].startFlag){ try{ Thread.sleep(5); }catch (Exception e){e.printStackTrace();} } } ActionStatusController res = new ActionStatusController(new ThreadUtils(new OnThreadStartHandler(){ @Override public void OnStart() { super.OnStart(); } })); res.start(); return res; } public static ActionStatusController Start(ActionStatusController[] actions){ Log.d("Bot", "before start"); for(int i = 0;i<actions.length;i++){ actions[i].start(); } Log.d("Bot", "started"); for(int i=0;i<actions.length;i++){ while (!actions[i].isFinished() || !actions[i].startFlag){ try{ Thread.sleep(5); }catch (Exception e){e.printStackTrace();} } } ActionStatusController res = new ActionStatusController(new ThreadUtils(new OnThreadStartHandler(){ @Override public void OnStart() { super.OnStart(); } })); res.start(); return res; } }这样在实际使用中就可以这样了
ActionStatusController.Start(reset()).then(new ActionStatusController[]{ AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 194, 500, 1), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 180, 500, 2), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 180, 500, 3), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 158, 500, 4), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 25, 500, 5), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 3, 500, BotApi.STEER_RIGHT_HAND) }).then(new ActionStatusController[]{ AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 194, 500, 1), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 140, 500, 2), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 172, 500, 3), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 500, 3, BotApi.STEER_RIGHT_HAND), }).then( AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 39, 300, BotApi.STEER_RIGHT_HAND) // 抓 ).then( AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 165, 300, 3) ).then(new ActionStatusController[]{ AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 237, 500, 1), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 144, 500, 3), AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 0, 500, 5) }).then( AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 12, 300, BotApi.STEER_RIGHT_HAND) ).then( AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 172, 300, 2) ).then( AnimateSteer(BotApi.STEER_ANGEL_CURRENT, 93, 300, 5) ).then( reset() ) /** * * @param start * @param end * @param duration * @param index index start from 1 * @return */ public static ActionStatusController AnimateSteer(int start, int end, int duration, final int index){ if(start == BotApi.STEER_ANGEL_DEFAULT){ start = BotApi.getDefaultAngles()[BotApi.jointMapping[index -1] - 1]; } if(start == BotApi.STEER_ANGEL_CURRENT){ start = BotApi.getCurrentAngles()[BotApi.jointMapping[index -1] - 1]; } if(end == BotApi.STEER_ANGEL_DEFAULT){ end = BotApi.getDefaultAngles()[BotApi.jointMapping[index -1] - 1]; } if(end == BotApi.STEER_ANGEL_CURRENT){ end = BotApi.getCurrentAngles()[BotApi.jointMapping[index -1] - 1]; } return actionAnimation(start, end, duration, new Cubicbezier(0.445, 0.05, 0.55, 0.95), new AnimationHandler(){ @Override public void onProgress(int value) { super.onProgress(value); BotApi.SetSteer(BotApi.jointMapping[index - 1], value); } }); }其中Cubicbezier(0.445, 0.05, 0.55, 0.95)就是缓动函数
package com.novelor.servicebot.servicebot.utils; import android.graphics.PointF; import com.novelor.servicebot.servicebot.models.AnimationTimeFunction; /** * Created by randoms on 2015/10/23. */ public class Cubicbezier implements AnimationTimeFunction { protected PointF start; protected PointF end; protected PointF a = new PointF(); protected PointF b = new PointF(); protected PointF c = new PointF(); public Cubicbezier(PointF start, PointF end) throws IllegalArgumentException { if (start.x < 0 || start.x > 1) { throw new IllegalArgumentException("startX value must be in the range [0, 1]"); } if (end.x < 0 || end.x > 1) { throw new IllegalArgumentException("endX value must be in the range [0, 1]"); } this.start = start; this.end = end; } public Cubicbezier(float startX, float startY, float endX, float endY) { this(new PointF(startX, startY), new PointF(endX, endY)); } public Cubicbezier(double startX, double startY, double endX, double endY) { this((float) startX, (float) startY, (float) endX, (float) endY); } /** * * @param time between 0 and 1 * @return between 0 and 1 */ @Override public float getInterpolation(float time) { return getBezierCoordinateY(getXForTime(time)); } protected float getBezierCoordinateY(float time) { c.y = 3 * start.y; b.y = 3 * (end.y - start.y) - c.y; a.y = 1 - c.y - b.y; return time * (c.y + time * (b.y + time * a.y)); } protected float getXForTime(float time) { float x = time; float z; for (int i = 1; i < 14; i++) { z = getBezierCoordinateX(x) - time; if (Math.abs(z) < 1e-3) { break; } x -= z / getXDerivate(x); } return x; } private float getXDerivate(float t) { return c.x + t * (2 * b.x + 3 * a.x * t); } private float getBezierCoordinateX(float time) { c.x = 3 * start.x; b.x = 3 * (end.x - start.x) - c.x; a.x = 1 - c.x - b.x; return time * (c.x + time * (b.x + time * a.x)); } }暂搁于此,以后再优化补充。
-
我找YouTube上找到了解决方案,大家可以参考一下
https://youtu.be/pcfJJxv6q1s?si=5W3cxVrD6KBp3Kfx
https://youtu.be/fC9uxdOBhfA?si=8ETIvuGc4ji6PzKs
https://youtu.be/T0bOZr-D6vs?si=tkZTFNhMPjpvStmY -
@realme https://easings.net/zh-cn#