ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ZED摄像头的使用
-
1. 安装CUDA
1.1 禁用原有的驱动
如果你之前安装了Nvidia的开源驱动,即通过apt-get 安装的驱动。则需要先把开源驱动禁用掉。
lsmod | grep nouveau #检测Nouveau是否开启,有输出则开启,无输出则为开启 #若Nouveau开启,执行以下命令 sudo gedit /etc/modprobe.d/blacklist-nouveau.conf #创建blacklist文件 # 在创建的文件中输入以下内容关闭掉Nouveau blacklist nouveau options nouveau modeset=0 # 更新list,使得更改生效 sudo update-initramfs -u然后再官网下载CUDA安装文件,推荐下载.run的文件
1.2 进入文本模式,禁用图像显示
下载完成后同时按下
Ctrl + Alt + F1进入文本模式,按照提示登入用户名密码。
然后执行下面指令关闭图形界面sudo service lightdm stop1.3 安装CUDA
执行
sudo sh cuda_9.2.148_396.37_linux.run根据安装过程的提示进行安装,一般默认就可以了。推荐安装上自带的驱动,防止自己安装驱动版本对不上。
1.4 设置环境变量
安装完成之后会提示设置环境变量,根据提示设置就可以了
在.bashrc文件中添加下面的内容export PATH=/usr/local/cuda/bin:$PATH export LD_LIBRARY_PATH=/usr/local/cuda/lib641.5 测试一下
bash nvcc -V正常应该会显示出CUDA的版本信息。
2. 下载安装SDK
从官方下载SDK
执行
chmod +x zed_sdk_file ./zed_sdk_file按照提示安装就可以了
3. 运行测试程序
cd /usr/local/zed/tools ./ZED\ Depth\ Viewer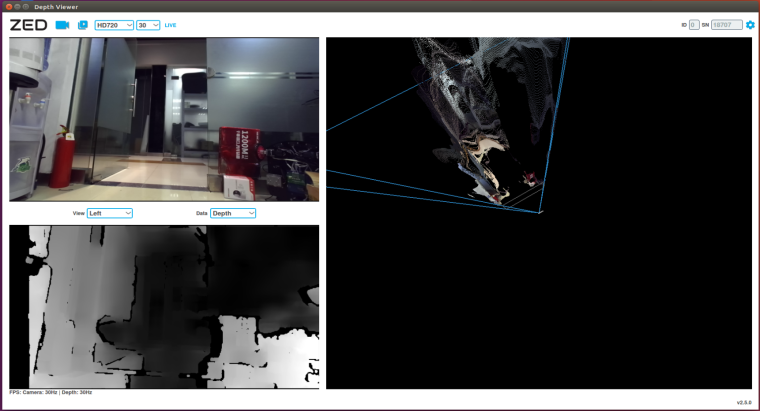
一切正常应该可以看到下图所示的画面。
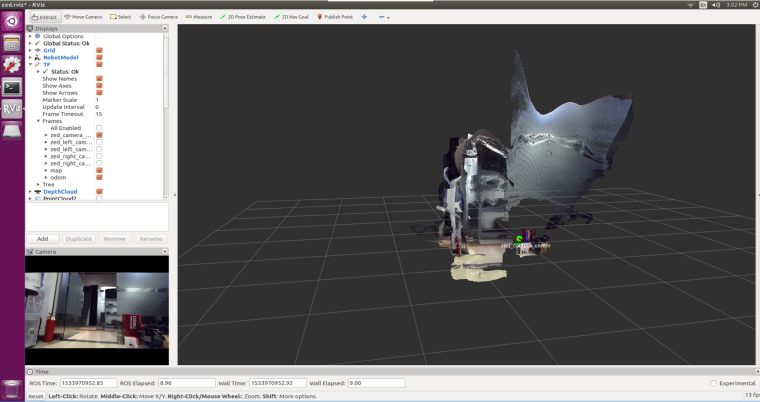
4. 安装ROS驱动
cd [to your workspace]/src git clone https://github.com/stereolabs/zed-ros-wrapper cd .. catkin_make -DCATKIN_WHITELIST_PACKAGES="zed_wrapper"5. 测试ROS驱动
等待编译完成
roslaunch zed_display_rviz display.launch正常即可看到下面的显示了