ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(28)___使用Intel RealSense D400系列深度摄像头进行自主移动避障
-
1.驱动测试
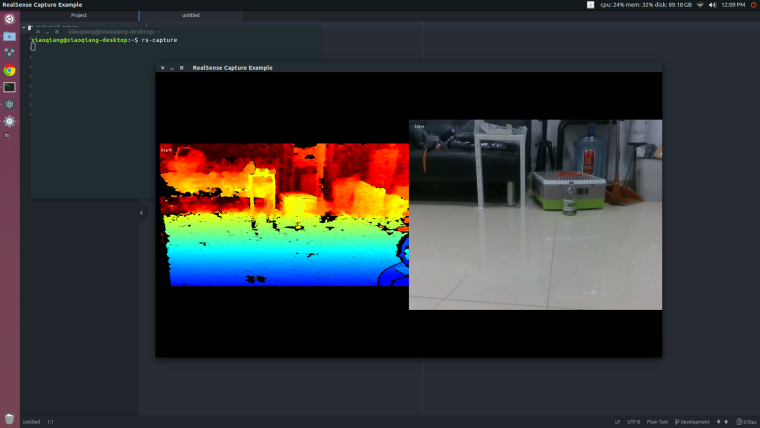
连接好RealSense摄像头后,运行下述命令可以测试sdk有没有安装成功
#sdk的安装教程 https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages rs-capture正常的话可以看到类似下图的图像
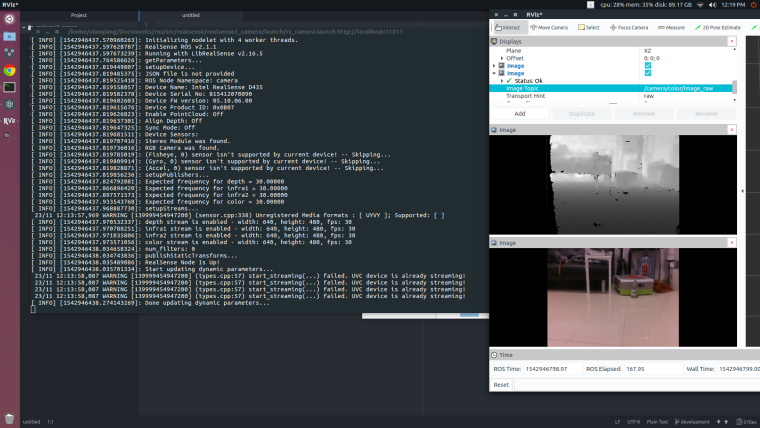
关闭上述命令,继续测试ros驱动#ros驱动的安装教程 https://gitee.com/bluewhalerobot/realsense roslaunch realsense2_camera rs_camera.launch如果正常,在rviz里面可以订阅显示深度和color图像话题。
2.关闭步骤1中命令,开始自主移动避障测试
intel RealsSense和kinect是兼容的,使用它来自主移动避障的教程也和kinect一样,区别是教程2.b、2.c步骤需要选择realsense。
roslaunch realsense2_camera rs_camera_xiaoqiang.launchkinect避障教程:
https://community.bwbot.org/topic/115/小强ros机器人教程-10-___使用kinect进行自主移动避障