ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(29)___安装使用zed相机cpu版本ros驱动
-
官方sdk和ros驱动需要使用cuda,如果主机不支持cuda就无法使用这些软件包,也就无法使用zed相机。很幸运,zed相机是一个uvc标准的摄像头,有第三方的ros驱动可以支持无nvidia显卡的主机使用。因为只使用cpu,因此只能获取摄像头的双目图像,官方的slam和深度信息处理功能是无法使用的。
下文将详细介绍如何在小强主机上安装使用zed相机cpu版本ros驱动。对于一些出厂已经配置过zed的小强用户,请跳过驱动安装步骤,可以直接启动相关launch文件进行测试。1. 在主机ros catkin工作空间中下载安装zed的ros驱动包
如果是已经配置好的小强用户,可以直接跳过本步骤。
#假设catkin工作空间在~/Documents/ros cd ~/Documents/ros cd src/ git clone https://github.com/BluewhaleRobot/zed_cpu_ros.git cd .. catkin_make2.将zed接入主机usb,添加udev规制,将设备号映射为/dev/video003
如果是已经配置好的小强用户,可以直接跳过本步骤。
#查看zed相机的id信息,即下条命令输出结果中以{SUBSYSTEM=="video4linux"}开头的部分内容,/videoXXX需要替换成实际设备号 udevadm info --name=/dev/videoXXX --attribute-walk#根据id信息,建立udev规则文件/etc/udev/rules.d/56-zed.rules,下面内容可供参考。对于非小强用户,xiaoqiang需要更换成自己的计算机用户名 SUBSYSTEM=="video4linux", ATTR{name}=="ZED: ZED", MODE:="0666", OWNER:="xiaoqiang", SYMLINK+="video003"#最后重新加载udev规则 udevadm control --reload-rules #重新插拔zed相机,如果 ls /dev可以看到video003设备,说明操作成功。3.启动ros驱动节点,正常的话可以在rviz中订阅显示zed的图像数据。
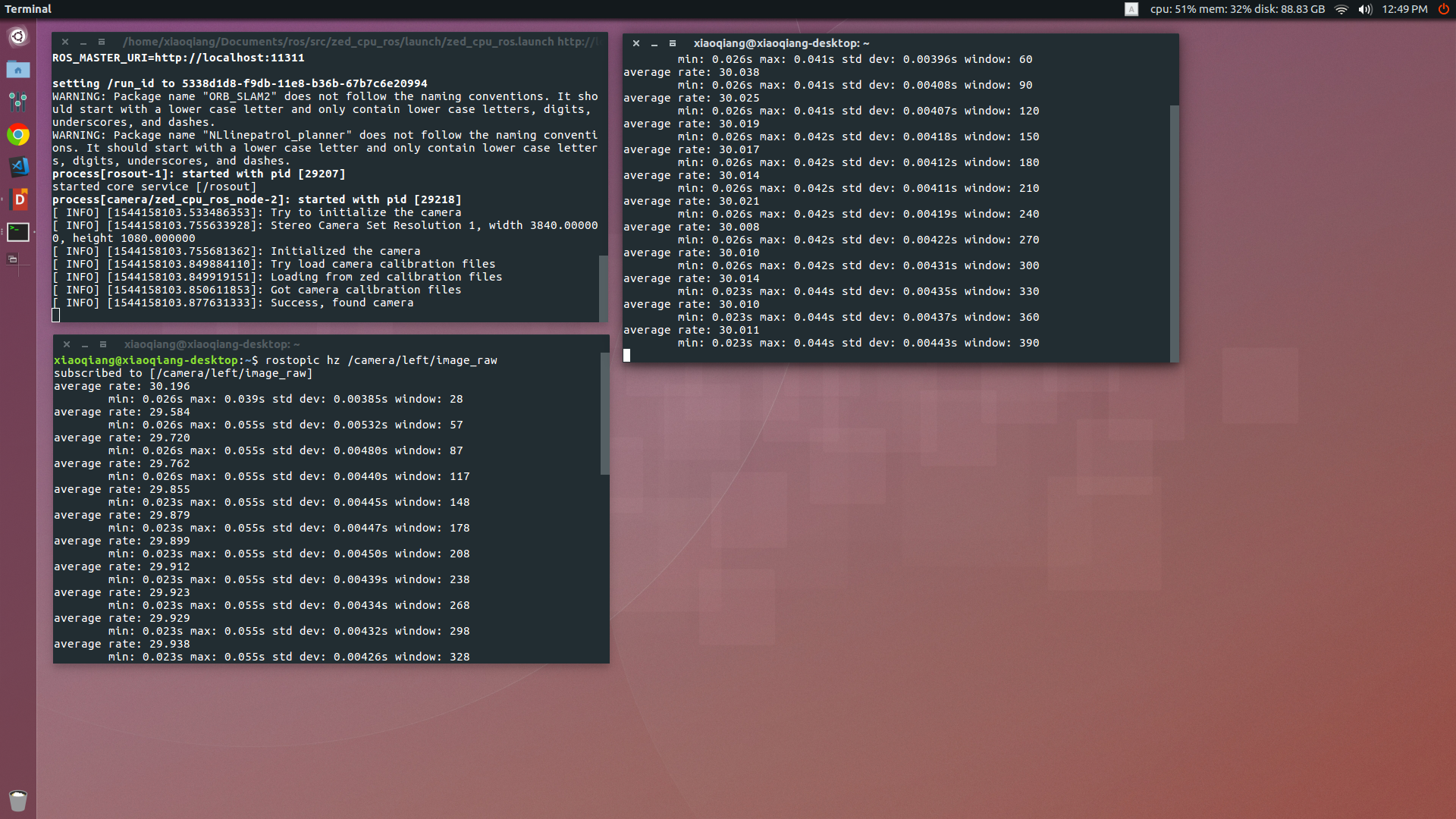
roslaunch zed_cpu_ros zed_cpu_ros.launch