ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
GPS在ROS中的测试和使用
-
通过GPS机器人可以获取定位信息。ROS中也提供了GPS的相关驱动包,可以方便的使用GPS的定位信息。下面以蓝鲸GPS模块为例演示如何在ROS中使用GPS传感器。其他的可以通过串口指令发布nmea语句的GPS模块都是通用的。
蓝鲸GPS模块采用AGPS定位方式,即GPS加手机基站的定位方式。相对于一般的GPS模块具有定位更加迅速和准确的优点。可以在官方淘宝店咨询购买。
首先在机器人上安装对应的软件包
安装gpsd
sudo apt-get install gpsd gpsd-clients设置模块udev规则
在机器人上运行
dmesg --follow将GPS模块的串口插入机器人USB接口,可以看到终端输出了串口的信息
[ 434.206803] ftdi_sio 2-7.2:1.0: FTDI USB Serial Device converter detected [ 434.206868] usb 2-7.2: Detected FT232BM [ 434.207105] usb 2-7.2: FTDI USB Serial Device converter now attached to ttyUSB0记住
2-7.2:1.0这个端口号
在/etc/udev/rules.d/95-persistent-serial.rules文件中添加下面的内容。如果没有这个文件就自己创建一个KERNELS=="2-7.2:1.0" ,SYMLINK+="ttyUSB005", SYMLINK+="bwgps", OWNER="xiaoqiang" ,RUN+="/bin/setserial /dev/ttyUSB005 low_latency"其中
KERNELS之后未刚才的端口号。OWNER设置未自己的用户。修改完成后保存退出,然后执行sudo udevadm control --reload执行完成之后重新插入GPS模块串口,然后就可以在/dev文件夹内看到bwgps和ttyUSB005两个文件。这样就说明之前的修改已经生效了。
测试GPS数据
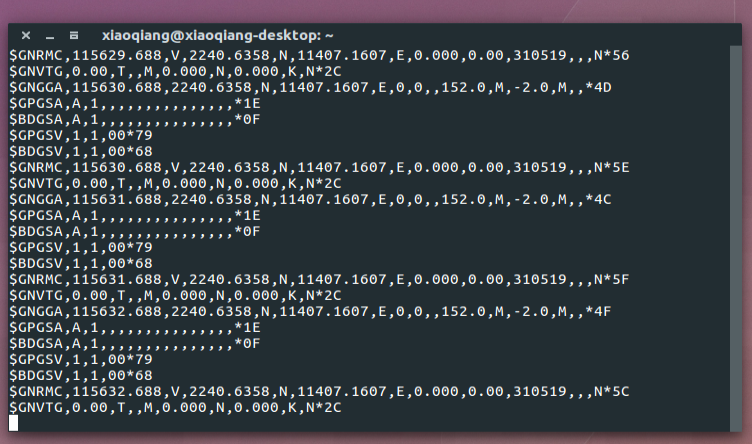
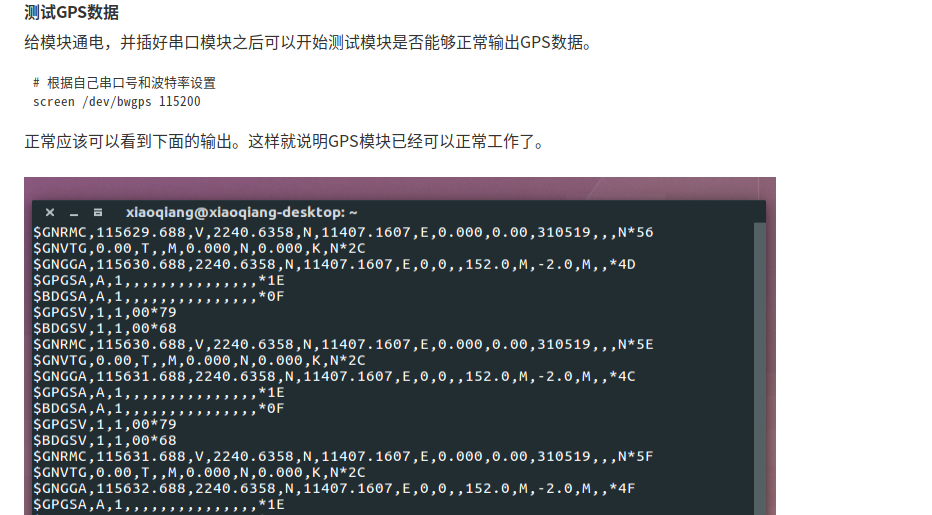
给模块通电,并插好串口模块之后可以开始测试模块是否能够正常输出GPS数据。
# 根据自己串口号和波特率设置 screen /dev/bwgps 115200正常应该可以看到下面的输出。这样就说明GPS模块已经可以正常工作了。
执行下面的指令停止screen指令
sudo killall screen设置 gpsd
# 设置串口波特率,蓝鲸GPS模块的波特率是115200,对于不同的模块根据模块参数设置。 sudo stty -F /dev/bwgps 115200 # 启动gpsd gpsd -D 5 -n -N -b /dev/bwgps然后执行
xgps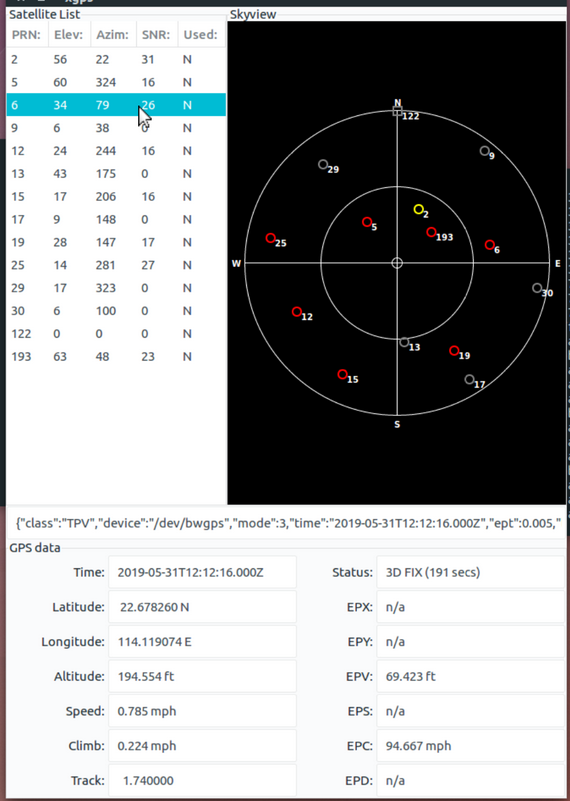
在空旷地方应该能够看到模块已经追踪的卫星。
在ROS中使用gps数据
在ROS中可以使用nmea_navsat_driver解析GPS数据。这个包会发出下面几个话题
话题 类型 简介 /fix sensor_msgs/NavSatFix GPS定位信息 /extend_fix gps_common/GPSFix GPSFix消息包含GPS卫星状态和定位信息 /time_reference sensor_msgs/TimeReference GPS时间信息 /vel geometry_msgs/TwistStamped GPS的速度信息 可以根据自己需求订阅相关信息
安装
首先下载安装这个包
cd [到你的工作空间]/src git clone https://github.com/BluewhaleRobot/nmea_navsat_driver cd .. catkin_make -DCATKIN_WHITELIST_PACKAGES="nmea_navsat_driver"修改launch文件,蓝鲸GPS模块用户可以不用修改直接使用。
<launch> <!-- A simple launch file for the nmea_serial_driver node. --> <arg name="port" default="/dev/bwgps" /> <arg name="baud" default="115200" /> <arg name="frame_id" default="gps" /> <arg name="time_ref_source" default="gps" /> <arg name="useRMC" default="false" /> <node name="nmea_serial_driver_node" pkg="nmea_navsat_driver" type="nmea_serial_driver" output="screen"> <param name="port" value="$(arg port)"/> <param name="baud" value="$(arg baud)" /> <param name="frame_id" value="$(arg frame_id)" /> <param name="time_ref_source" value="$(arg time_ref_source)" /> <param name="useRMC" value="$(arg useRMC)" /> </node> </launch>各个参数的含义都十分明确,根据自己的设备参数进行修改就可以了。
运行测试
roslaunch nmea_navsat_driver nmea_serial_driver.launch正常情况下就可以通过各个topic订阅信息了。注意如果之前运行了gpsd要先把gpsd关闭。
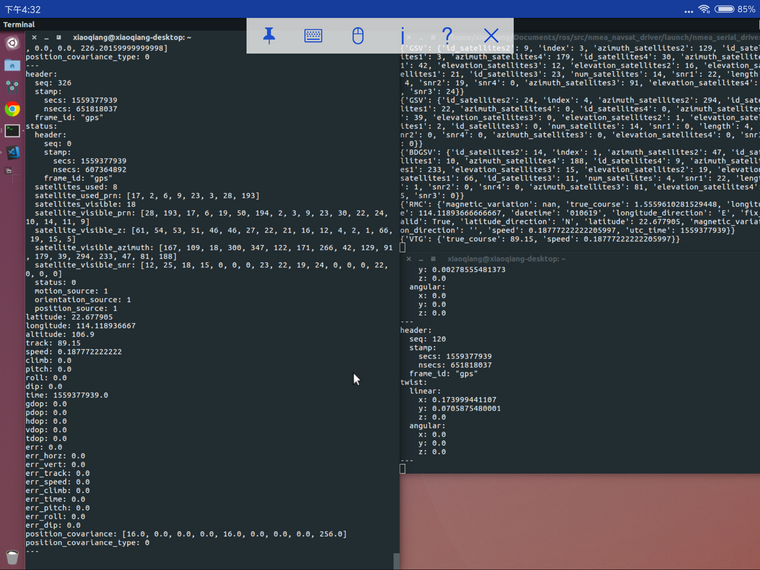
左侧是extend_fix话题数据。可以通过
satellite_visible_prn看到已经看到的卫星编号。注意在开阔环境下才会有比较好的定位效果。 -
如果运行gpsd时出现, 这种错误 can’t bind to IPV4 port gpsd,Address already in use。可能是因为后台在执行gpsd这个服务,把它关闭掉再尝试运行。
sudo service gpsd stop gpsd -D 5 -n -N -b /dev/bwgps -
执行到这一步了,但是设置波特率的时候会显示[screen is terminating],并且请问怎么在终端中看到gps模块发来的数据?
-
@叫我小冬枣 可能你的设备路径不对吧