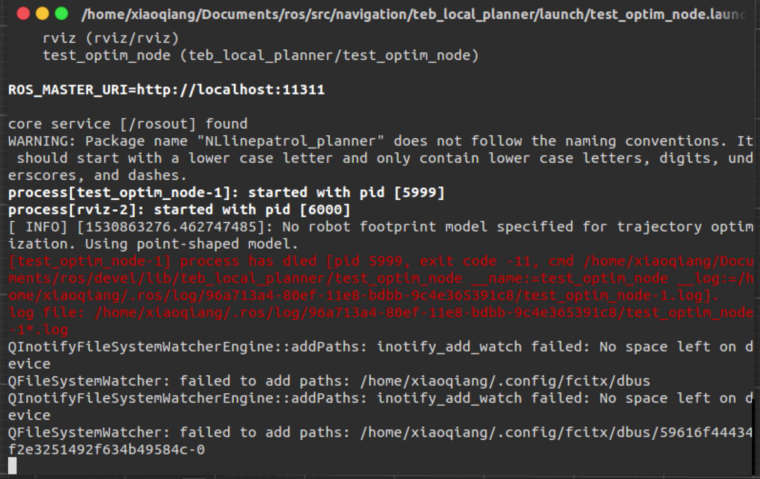
做官网的第一步教程,roslaunch teb_local_planner test_optim_node.launch 后出现这样的问题,请问该怎么解决呢?
做官网的第一步教程,roslaunch teb_local_planner test_optim_node.launch 后出现这样的问题,请问该怎么解决呢?
在测试小强机器人的时候,有没有简单的程序让小强走直线、圆、三角形等简单形状呢?教程里的控制程序不多,新手不太能理解,希望可以出个像这样的教程:http://rosclub.cn/post-671.html