Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
@weijiz 然而并没有啊
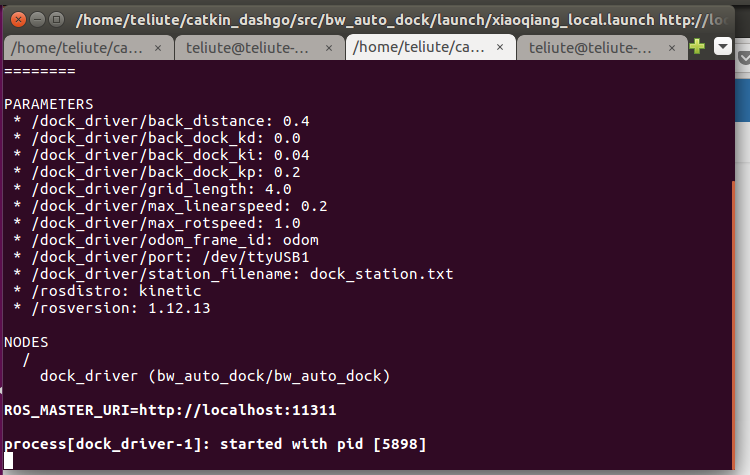
这是我启动节点的输出
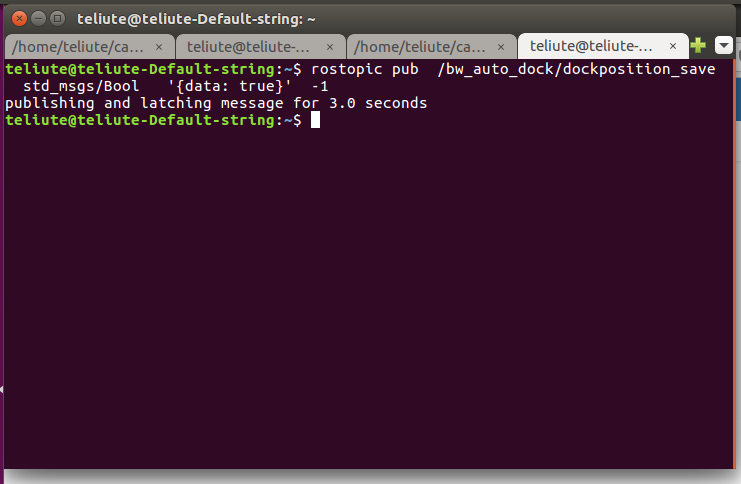
我运行保存位置节点,这是终端显示,然而并没有保存到slamdb目录中
怎么发图片啊?我建立了slambd目录,运行命令后不能保存位置