版本:ubuntu20.04 ros1
我在solidworks中建立了机器人模型并输出了urdf文件。
<?xml version="1.0" encoding="utf-8"?>
<!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com)
Commit Version: 1.6.0-4-g7f85cfe Build Version: 1.6.7995.38578
For more information, please see http://wiki.ros.org/sw_urdf_exporter -->
<robot
name="3d_print_robot_model">
<link
name="base_link">
<inertial>
<origin
xyz="0.19898390423237 0.136295828839814 0.0559696626408911"
rpy="0 0 0" />
<mass
value="1.57046726571518" />
<inertia
ixx="0.0161662239279828"
ixy="-4.51732951485129E-08"
ixz="4.53270639100012E-07"
iyy="0.0069929467963612"
iyz="-2.83217287565168E-08"
izz="0.0221140119223207" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.776470588235294 0.756862745098039 0.737254901960784 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/base_link.STL" />
</geometry>
</collision>
</link>
<link
name="trans1">
<inertial>
<origin
xyz="0.251041515587677 -0.020143080425782 -0.0239546550789421"
rpy="0 0 0" />
<mass
value="1.27430857423357" />
<inertia
ixx="0.00142116644244525"
ixy="7.61020229656834E-08"
ixz="-4.38157220825767E-08"
iyy="0.0178126840190855"
iyz="-0.00034411056257697"
izz="0.0174663670074097" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/trans1.STL" />
</geometry>
<material
name="">
<color
rgba="0.627450980392157 0.627450980392157 0.627450980392157 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/trans1.STL" />
</geometry>
</collision>
</link>
<joint
name="trans1j"
type="prismatic">
<origin
xyz="-0.097806 0.26668 0.19086"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="trans1" />
<axis
xyz="0 -1 0" />
<limit
lower="-0.1"
upper="0.3"
effort="100"
velocity="1" />
</joint>
<link
name="trans2">
<inertial>
<origin
xyz="0.0274040137942429 -0.0130854946724574 -0.0963303271399604"
rpy="0 0 0" />
<mass
value="0.340507075853314" />
<inertia
ixx="0.000710350535613184"
ixy="6.45300313054141E-07"
ixz="-5.41413301944147E-07"
iyy="0.000885240004833508"
iyz="-2.5310686133709E-07"
izz="0.00020549973328961" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/trans2.STL" />
</geometry>
<material
name="">
<color
rgba="0.627450980392157 0.627450980392157 0.627450980392157 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/trans2.STL" />
</geometry>
</collision>
</link>
<joint
name="trans2j"
type="prismatic">
<origin
xyz="0.23825 -0.01882 0.13574"
rpy="0 0 0" />
<parent
link="trans1" />
<child
link="trans2" />
<axis
xyz="-1 0 0" />
<limit
lower="-0.2"
upper="0.2"
effort="100"
velocity="1" />
</joint>
<link
name="trans3">
<inertial>
<origin
xyz="0.000409660273492346 0.0225705291571963 -0.0822632214009157"
rpy="0 0 0" />
<mass
value="0.222484066630729" />
<inertia
ixx="0.000109697390742199"
ixy="3.44372047080085E-07"
ixz="-2.4816924229294E-10"
iyy="0.000256232209662399"
iyz="-6.5646480077053E-10"
izz="0.000246948709210129" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/trans3.STL" />
</geometry>
<material
name="">
<color
rgba="0.509803921568627 0.509803921568627 0.588235294117647 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/trans3.STL" />
</geometry>
</collision>
</link>
<joint
name="trans3j"
type="prismatic">
<origin
xyz="0.028832 -0.081699 -0.055943"
rpy="0 0 0" />
<parent
link="trans2" />
<child
link="trans3" />
<axis
xyz="0 0 -1" />
<limit
lower="-0.1"
upper="0.05"
effort="100"
velocity="1" />
</joint>
<link
name="ror">
<inertial>
<origin
xyz="-7.89010088469988E-06 -2.21880413486808E-07 0.0901578124971945"
rpy="0 0 0" />
<mass
value="0.291525306330778" />
<inertia
ixx="0.000391685635976909"
ixy="-3.40344185301567E-09"
ixz="1.24543651227828E-07"
iyy="0.000391752179776028"
iyz="-9.49073079659087E-11"
izz="9.82239673904642E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/ror.STL" />
</geometry>
<material
name="">
<color
rgba="0.627450980392157 0.627450980392157 0.627450980392157 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://3d_print_robot_model/meshes/ror.STL" />
</geometry>
</collision>
</link>
<joint
name="rorj"
type="revolute">
<origin
xyz="0 0 -0.16563"
rpy="0 0 0" />
<parent
link="trans3" />
<child
link="ror" />
<axis
xyz="0 0 1" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
</robot>
在其上加入了摄像头部件的物理信息xacro文件
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 摄像头属性 -->
<xacro:property name="camera_length" value="0.001" /> <!-- 摄像头长度(x) -->
<xacro:property name="camera_width" value="0.001" /> <!-- 摄像头宽度(y) -->
<xacro:property name="camera_height" value="0.001" /> <!-- 摄像头高度(z) -->
<xacro:property name="camera_x" value="0.00390" /> <!-- 摄像头安装的x坐标 -->
<xacro:property name="camera_y" value="-0.00670" /> <!-- 摄像头安装的y坐标 -->
<xacro:property name="camera_z" value="0.01307" /> <!-- 摄像头安装的z坐标 -->
<!-- 摄像头关节以及link -->
<link name="camera_link">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</visual>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.0001" ixy="0" ixz="0" iyy="0.0001" iyz="0" izz="0.0001"/>
</inertial>
</link>
<joint name="camera2base_link" type="fixed">
<parent link="ror" />
<child link="camera_link" />
<origin xyz="${camera_x} ${camera_y} ${camera_z}" />
</joint>
</robot>
以及传感器插件xacro文件
<?xml version="1.0"?>
<robot name="my_sensors" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- camera -->
<gazebo reference="camera_link">
<sensor type="camera" name="camera_sensor">
<update_rate>30.0</update_rate>
<camera>
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>30.0</updateRate>
<cameraName>robot/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</robot>
组装的xacro文件
<robot name="my_robot" xmlns:xacro="https://wiki.ros.org/xacro">
<xacro:include filename="$(find 3d_print_robot_model)/xacro/robot.xacro"/>
<xacro:include filename="$(find 3d_print_robot_model)/xacro/camera.xacro"/>
<!--gazebo仿真文件-->
<xacro:include filename="$(find 3d_print_robot_model)/xacro/g_camera.xacro"/>
<!-- xacro:include filename="ros_control.xacro"/>-->
<!--xacro:include filename="deepcamera.xacro"/>-->
<!-- <xacro:include filename="laser_gazebo.xacro"/> -->
</robot>
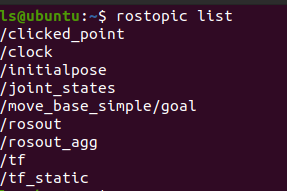
上述代码中,camera的图片信息回发布在image_raw主题中,但实际运行时通过查找rostopic list发现该话题并未发布。
在rviz当中机器人的物理信息也完全显示出来,没有问题。
请问这是什么原因造成的呢?