您好,请问下,我再成功构建了ros_rknn_yolo包后,在按照教程到输入’roslaunch ros_rknn_yolo xiaoqiang_yolo.launch‘指令,并更改了default.yaml文件的模型路径后,出现了如下报错,能麻烦您看看这是怎么回事吗: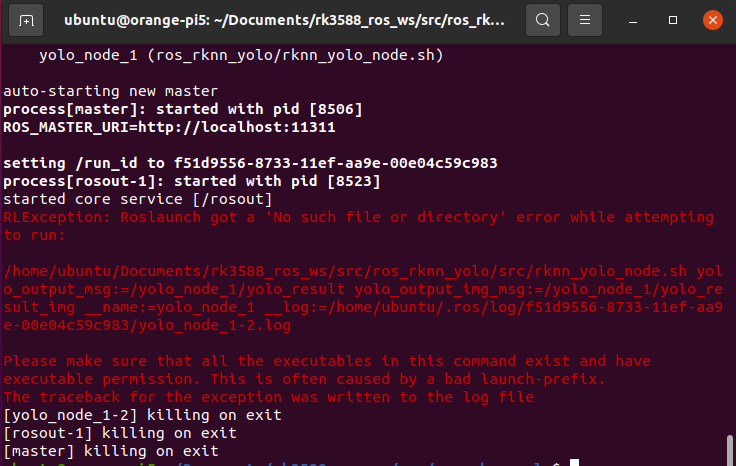
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Natsuki 发布的最新帖子
-
RE: rk3588在ros中使用ros_rknn_yolo包发布在 技术交流
