@xiaoqiang @weijiz
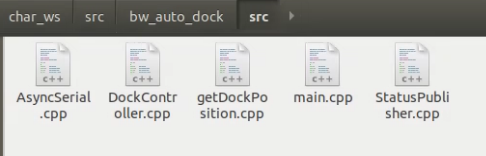
我已经检查了摄像头,二维码识别,odom,速度,全都工作良好。运行xiangqiang_local.launch文件,试图打印dock_position,没有任何输出,运行保存dock_position也没有任何数据。我想问一下,应该检查如下哪个文件?
 谢谢
谢谢
我现在觉得getDockPosition.cpp文件根本就没有subscribe任何topic。
您能提供一下测试好的正确代码吗?或者告诉我应该如何能修改现有代码,能保存充电桩位置。或者是您告诉我应该如何测验?来回来去还久了,能麻烦您提供一个有效的解决方法吗?谢谢
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Yanyan1011 0 发布的最新帖子
-
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务

-
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务
@xiaoqiang @weijiz
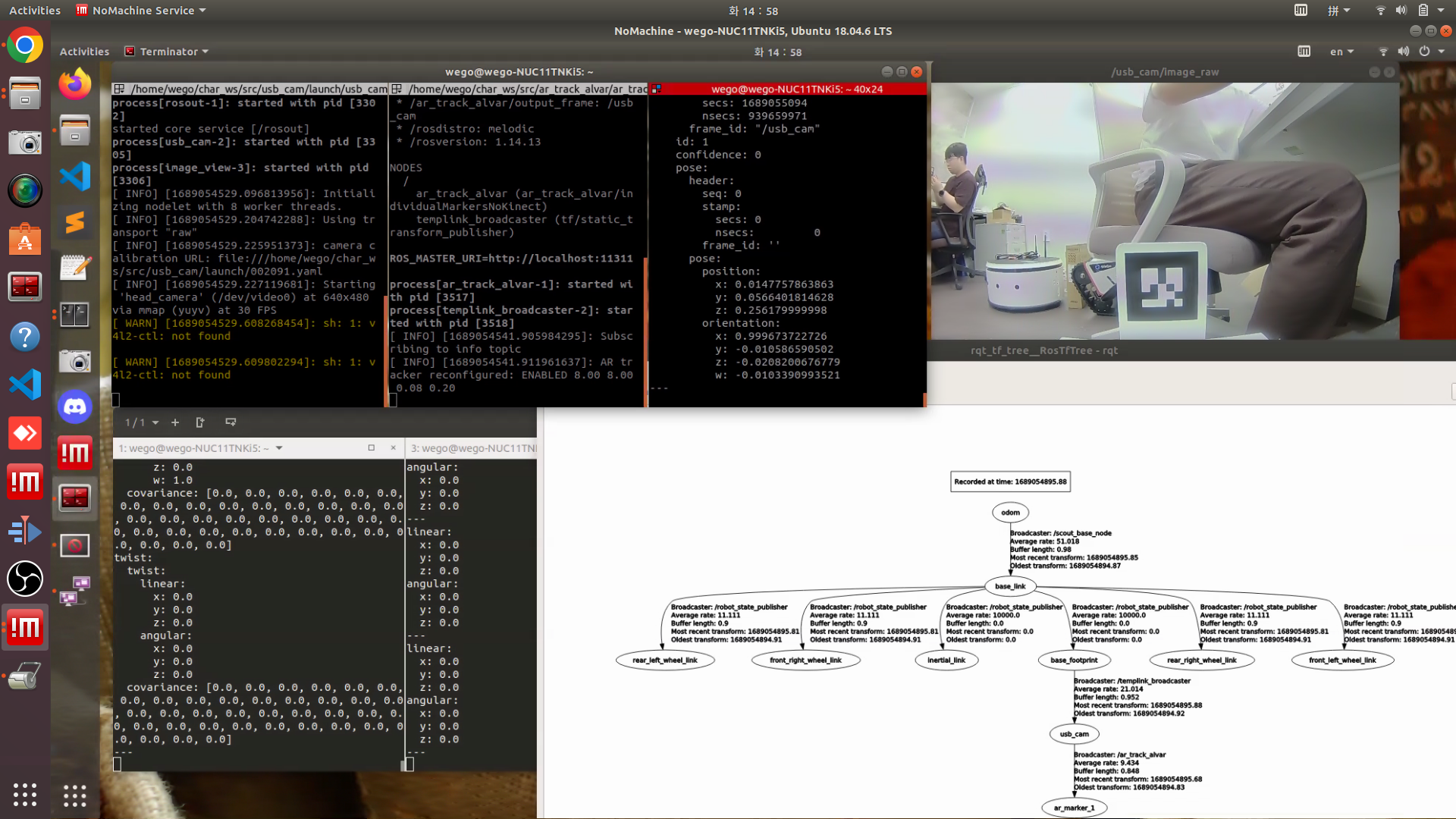
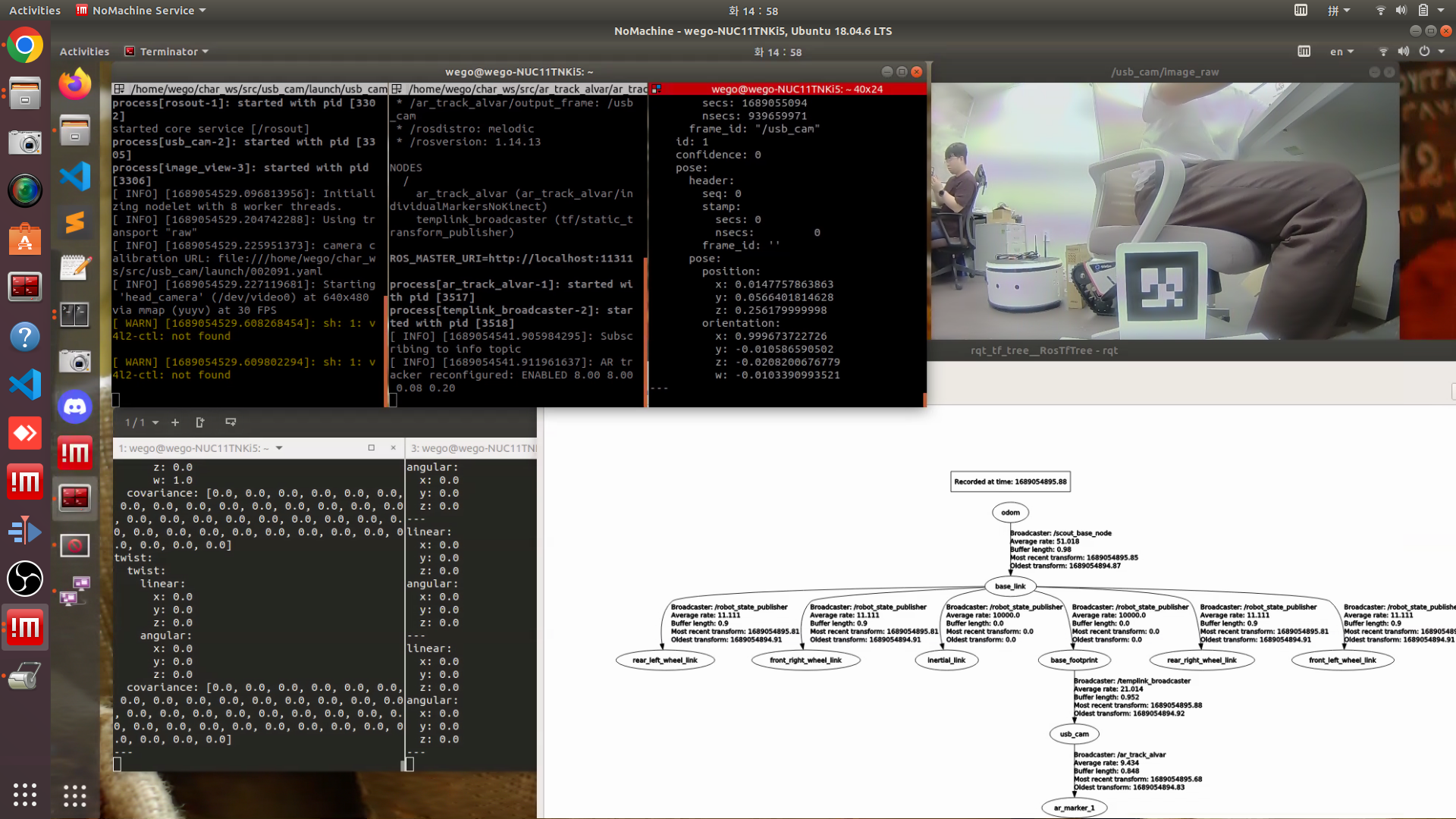
能识别ar_maker,id 为1.
有odomtopic,目前都为0.
cmd_vel,都为0.
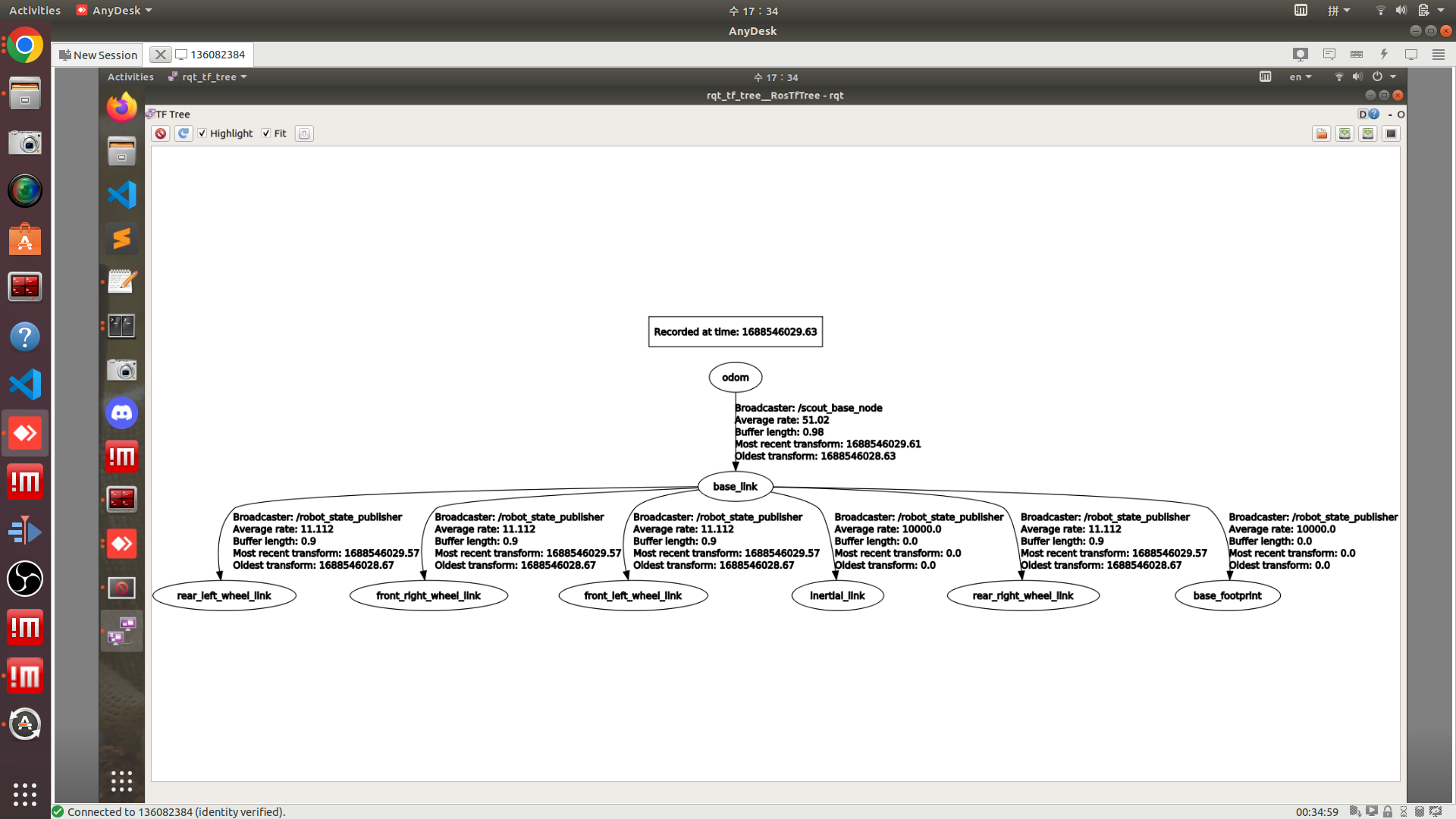
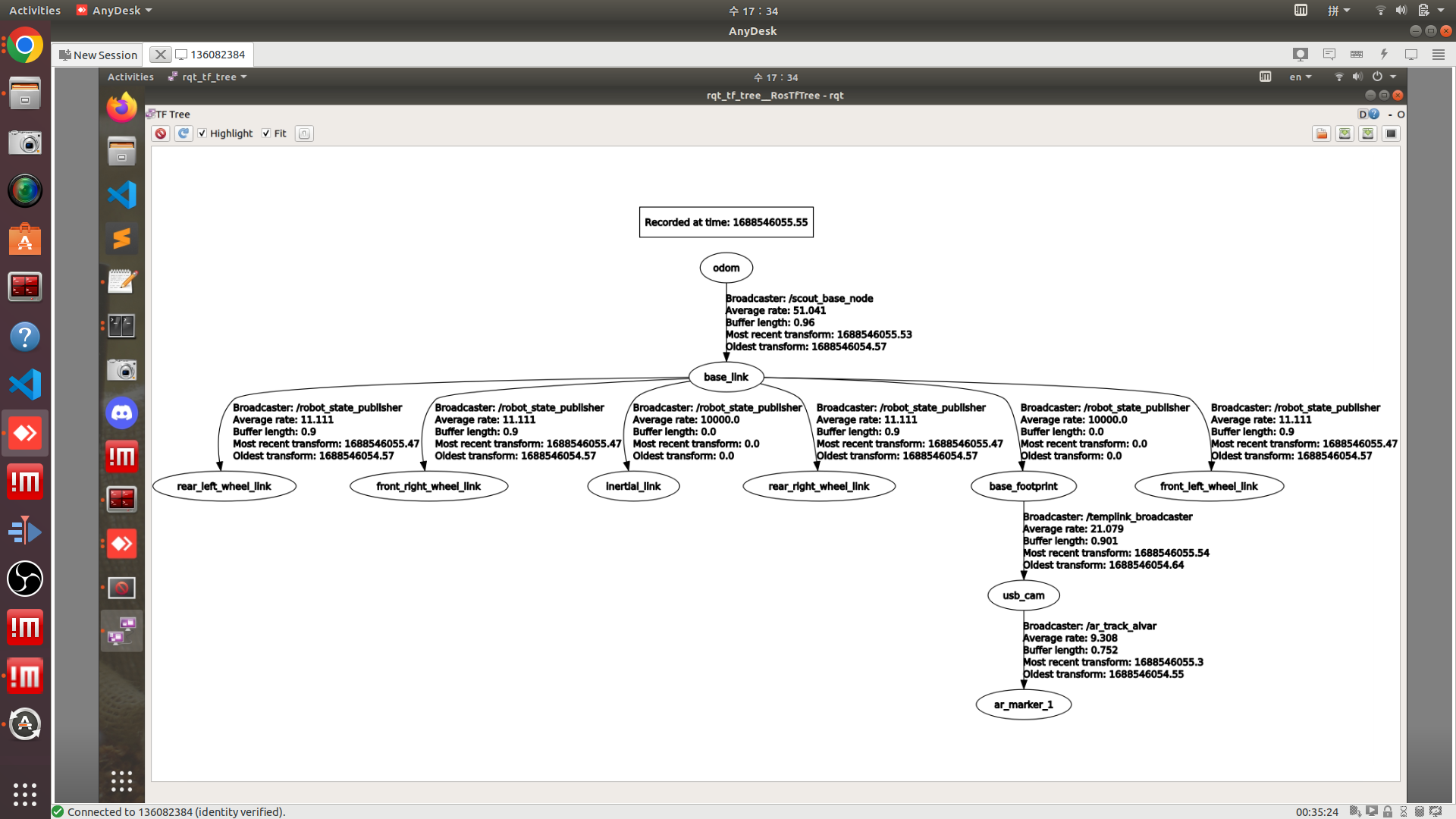
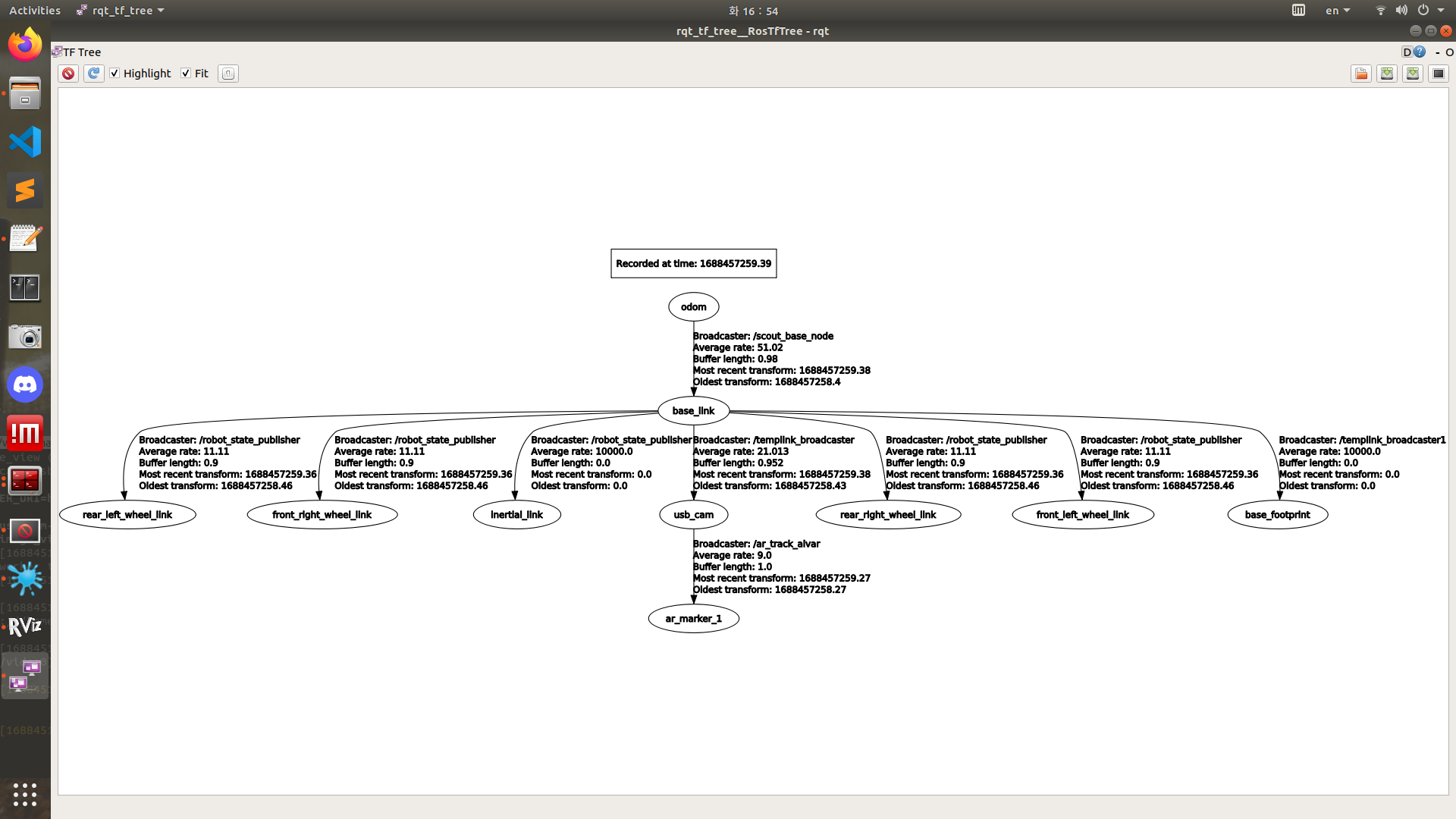
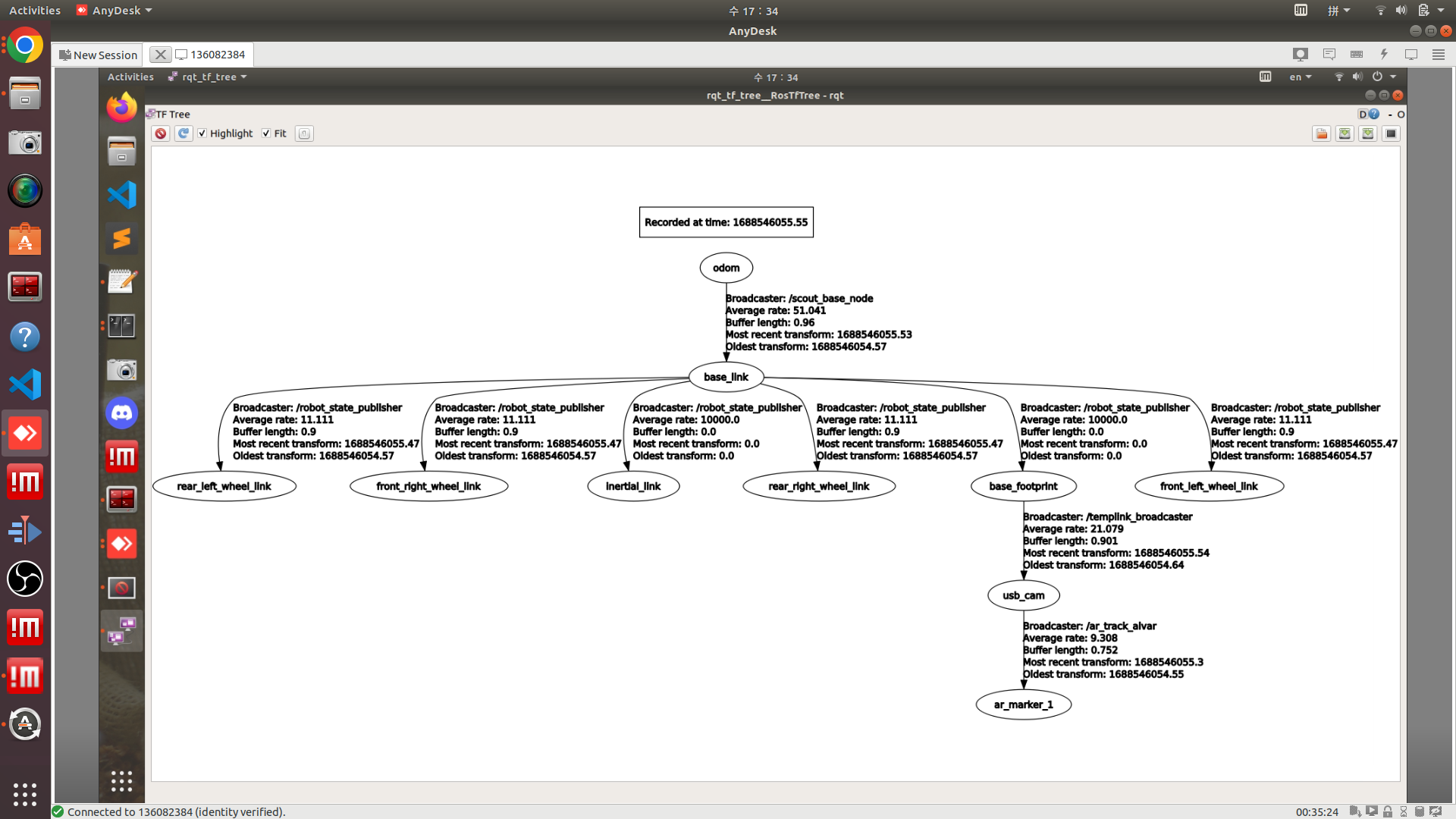
rqt_tree如图
-
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务
@xiaoqiang
能识别ar_maker,id 为1.
有odomtopic,目前都为0.
cmd_vel,都为0.
rqt_tree如图,
-
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务
@xiaoqiang @小助理 @weijiz
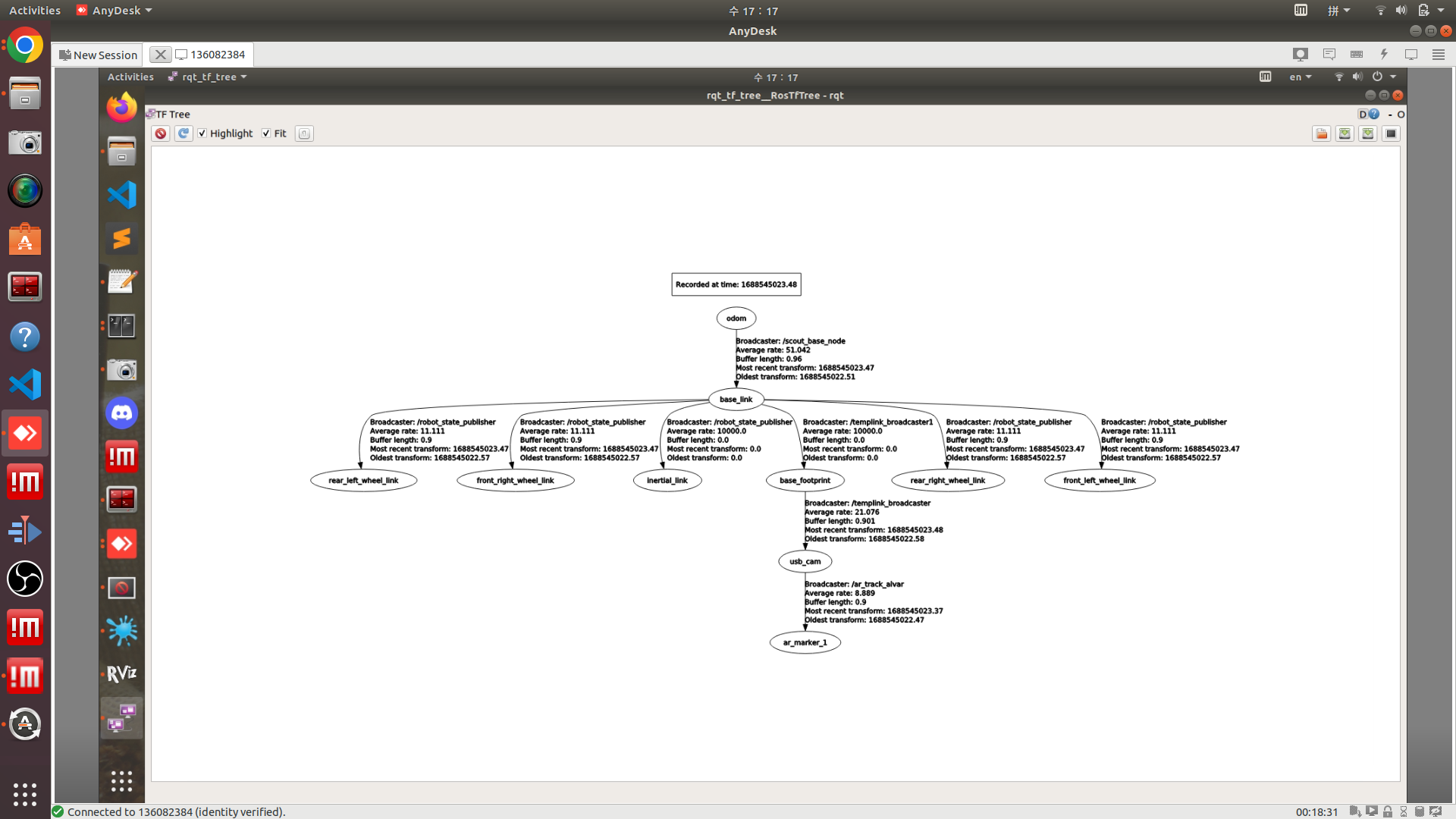
但为什么存不到dock_position呢?解决方法是什么呢?我的tf是这样的
-
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务
@weijiz 我的odom到base_link,是机器人发布的。
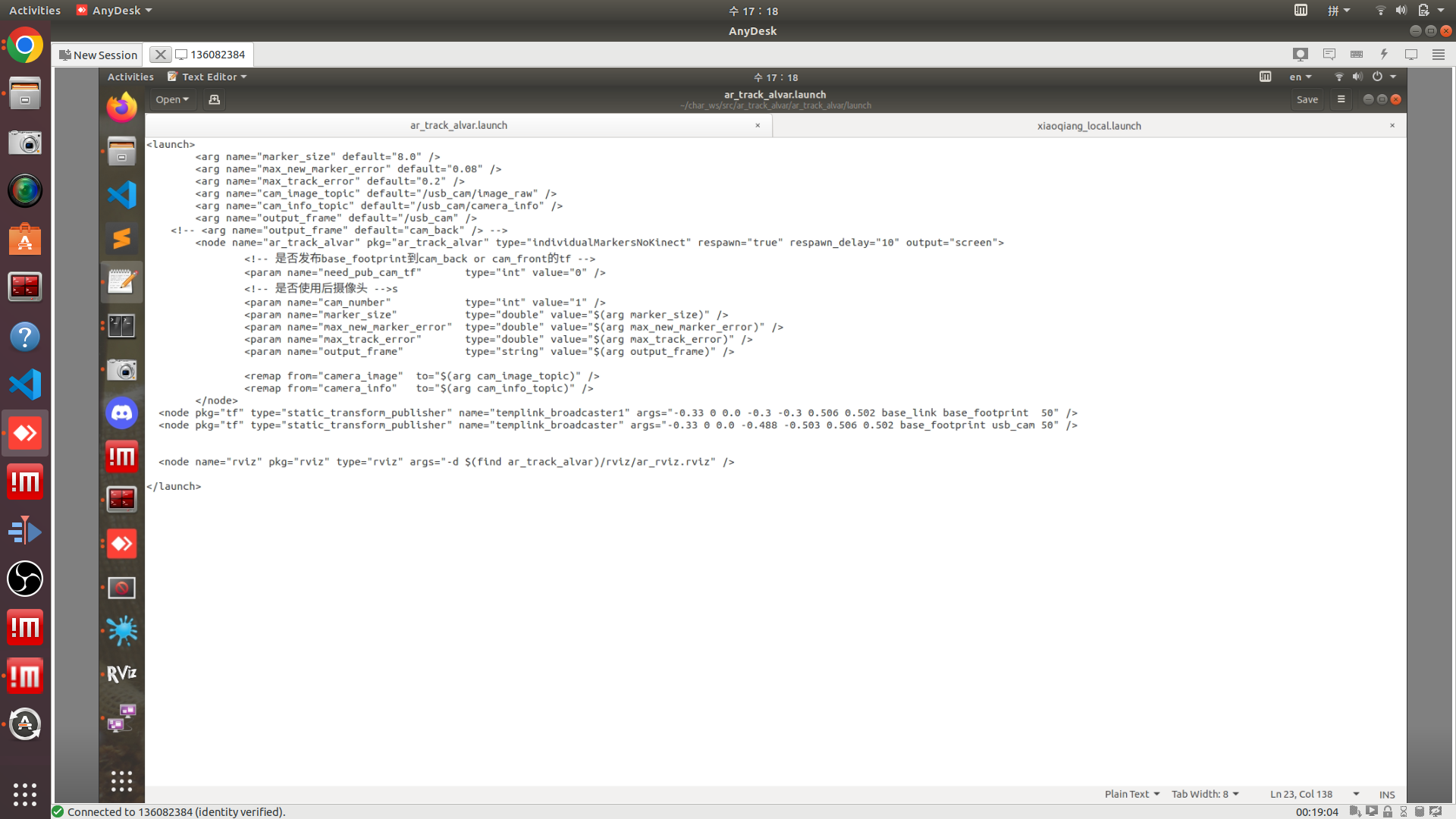
我的机器人的tf结构没办法改,我现在想在充电部分把base_link和base_footprint之间的tf反过来。如果按照我给您发的tf树,我应该如何修改代码?