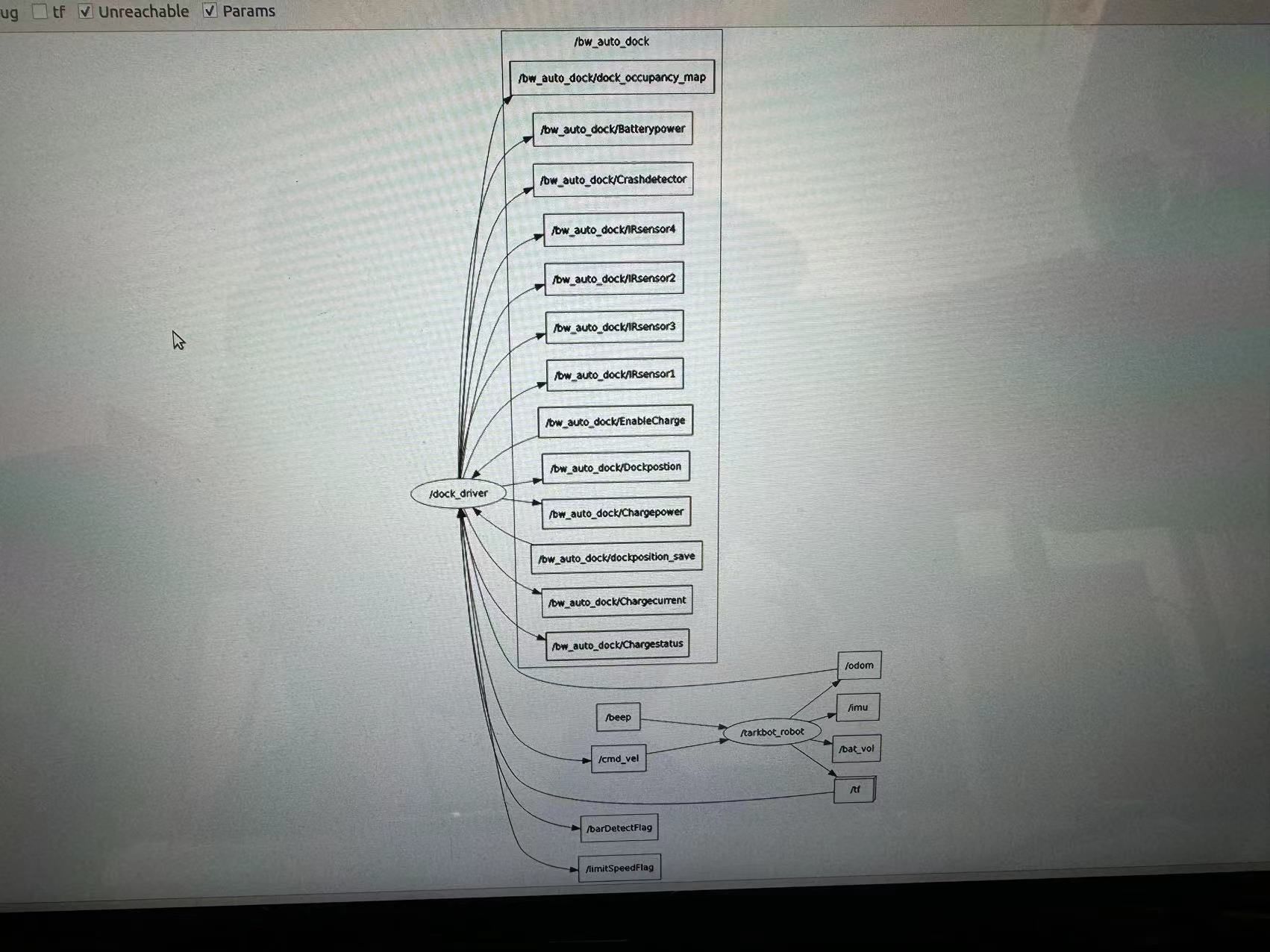
请问rqt出来的是这个结果吗,这个关系对吗
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Zhiming 发布的帖子
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
在运行手动设置充电桩位置命令之后

但是slamdb文件夹中没有生成文件,这个是我文件夹的绝对地址

这是我的launch文件
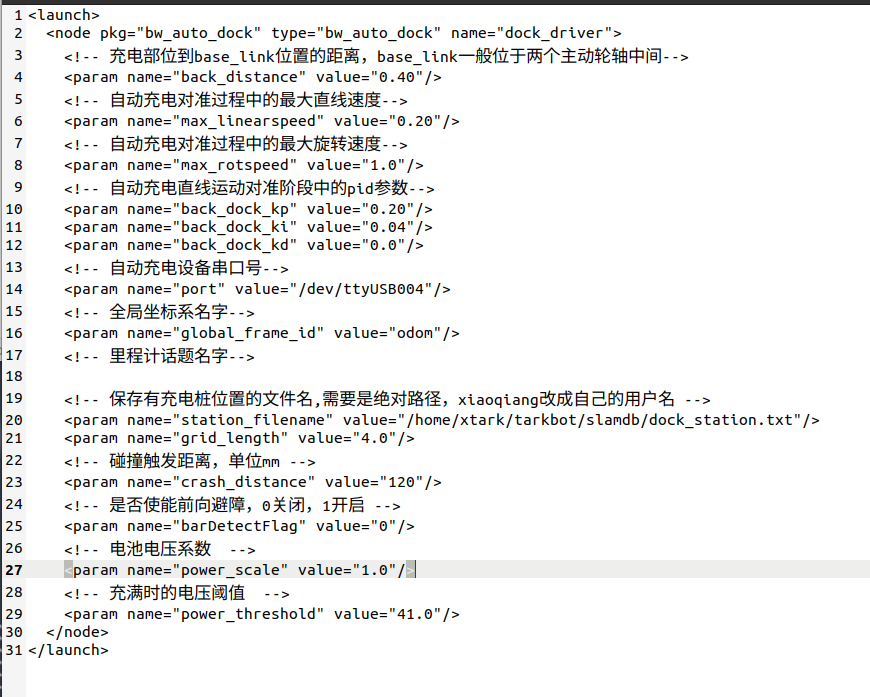
因为我的里程计话题名也是odom,所以将remap删掉了
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
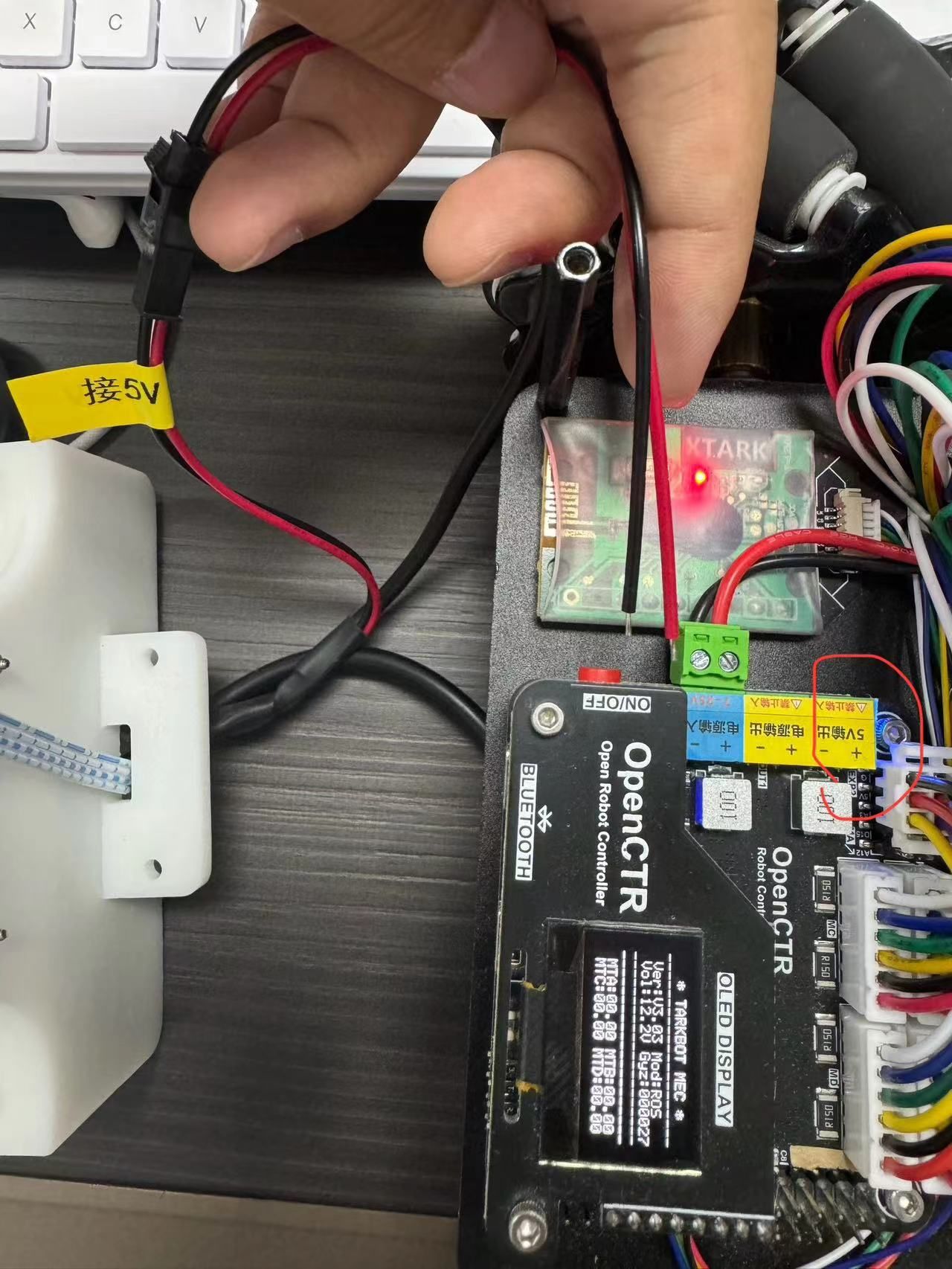
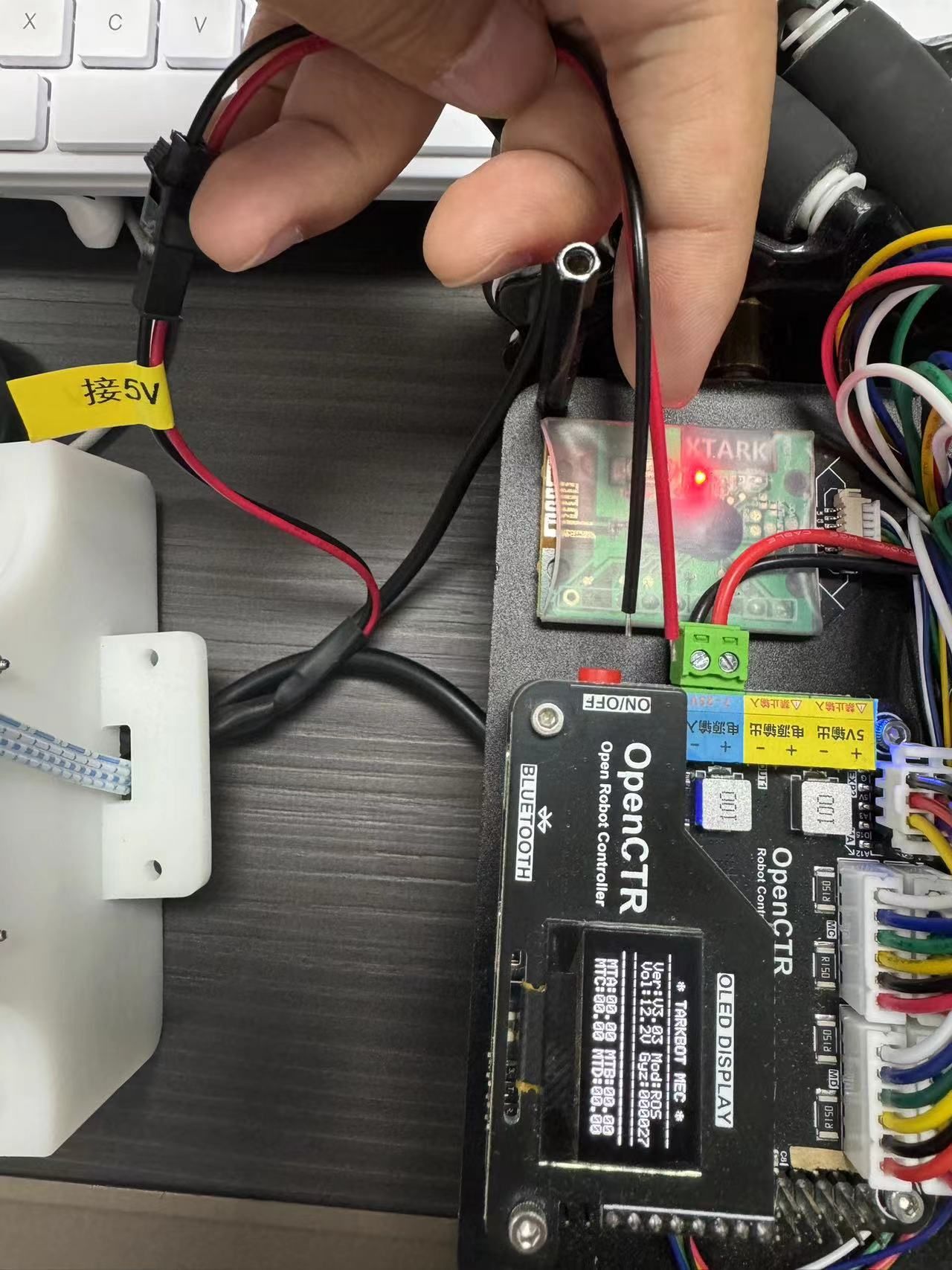 请问这个接5V的线是连接电源输入的吗,但是我这里的电源输入适配7~25V的电压,我应该怎么办
请问这个接5V的线是连接电源输入的吗,但是我这里的电源输入适配7~25V的电压,我应该怎么办