ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
square.py执行问题
-
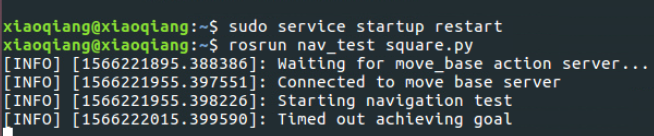
执行rosrun nav_test square.py 命令后显示问题,小车没反应 -
@murongsina 1.小强主机名字应该是xiaoqiang-desktop , 2.根据教程检查tf树是否完整。
-
感谢回复,我在XQ-4上装了新版镜像系统改了主机名,要改回去是嘛?按教程做没有TF树,现在不能执行命令,不能和master通信
-
@weijiz
更新固件之后的TF树正常,只认其中一个USB口,电脑其他的口就连不到底盘 -
@murongsina 不要轻易更新固件,固件不一定适合你的底盘。底盘型号虽然都是一样的,但是也可能存在定制修改内容。udev规则设置一下,让底盘串口映射成ttyUSB001
-
@xiaoqiang
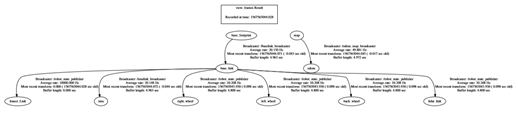
您好,启动fake_move_base_blank_map.launch后TF显示异常,这个是怎么回事呢 -
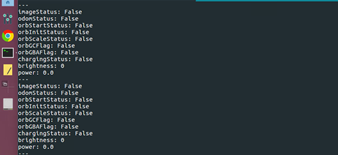
@murongsina 底盘驱动没有正常工作,导致里程计odom到base_footprint断开。在小车主机上执行bwcheck命令查找原因。
-
@xiaoqiang 重启服务以后底盘驱动没有正常工作,不显示电池状态,硬件连接没问题。