ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(7)___使用ps3手柄控制小强移动
-
原理:本教程涉及3个包
ps3joy负责将ps3蓝牙接受信号转换成标准的linux设备(/dev/input/js0)
joy_node节点负责将上述joy设备数据转换成ros中的joy数据类型
turtlebot_teleop_joy负责将上述joy数据topic 转换成小车运动指令/cmd_vel操作步骤
0.第一次使用手柄,需要将手柄与蓝牙接受器进行绑定,以后可以直接从步骤1开始
如果手柄和小强同时购买,那么我们已经提前为您将手柄配对可以从步骤1开始使用。
绑定方法参考原装和国产ps3手柄ros驱动程序中的“快速使用方法步骤1”1.启动ps3joy,将ps3手柄与蓝牙接受器配比
#确保蓝牙接收器已经插入主机usb口 sudo bash rosrun ps3joy ps3joyfake_node.py正常会出现下面的提示
root@xiaoqiang-desktop:~# rosrun ps3joy ps3joyfake_node.py No inactivity timeout was set. (Run with --help for details.) Waiting for connection. Disconnect your PS3 joystick from USB and press the pairing button.如果提示下列错误
按下下图中的手柄配对键

配对成功的话,上面的窗口会输出类似下面的结果root@xiaoqiang-desktop:~# rosrun ps3joy ps3joyfake_node.py No inactivity timeout was set. (Run with --help for details.) Waiting for connection. Disconnect your PS3 joystick from USB and press the pairing button. Connection activated2.启动joy_node和turtlebot_teleop_joy
roslaunch turtlebot_teleop ps3fakexiaoqiang_teleop.launch正常启动后如下图所示
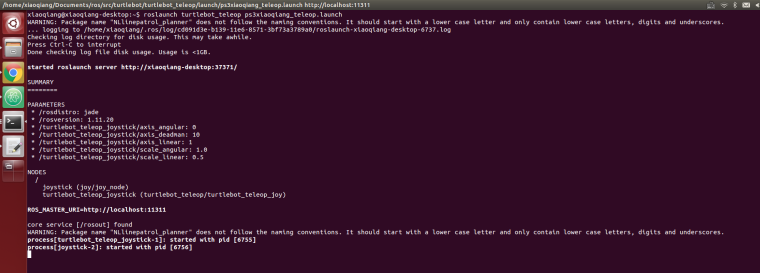
ps3fakexiaoqiang_teleop.launch文件内容如下<launch> <node pkg="turtlebot_teleop" type="turtlebot_teleop_joy" name="turtlebot_teleop_joystick"> <param name="scale_angular" value="0.4"/> <param name="scale_linear" value="0.4"/> <param name="axis_deadman" value="10"/> <param name="axis_linear" value="1"/> <param name="axis_angular" value="0"/> <param name="axis_enbar" value="12"/> <param name="axis_disenbar" value="14"/> <remap from="turtlebot_teleop_joystick/cmd_vel" to="/cmd_vel"/> <remap from="turtlebot_teleop_joystick/joy" to="/joy"/> </node> </launch>上述launch文件中的参数分别对应直线速度最大值(scale_linear)和角速度最大值(scale_angular),油门离合键(axis_deadman)、前进后退轴(axis_linear)、左右转轴(axis_angular),底盘红外使能键(axis_enbar),底盘红外关闭键(axis_disenbar),这些控制按键、摇杆的映射关系。
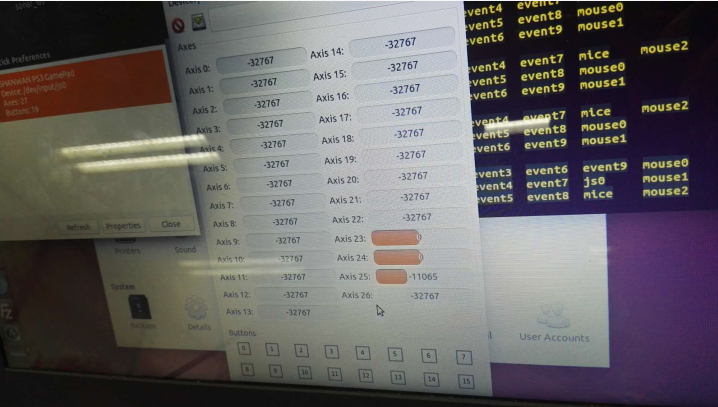
3.保持按住手柄油门键(下图中的10号键),现在使用左侧的推杆可以控制小车的前后移动和转向(下图中的1+1-摇杆)



根据这些按键编号,可以修改launch文件中的相关参数从而改变按键映射关系
花样玩法
购买ps3手机支架, 安卓手机装上小强图传app,这样可以实现图传遥控

-
此回复已被删除! -

-
@yangoogle 只有上面教程里面的带编号的按键和轴才有效,其它轴比如25轴ros驱动里面没有使用,值漂不漂都没有用。