ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
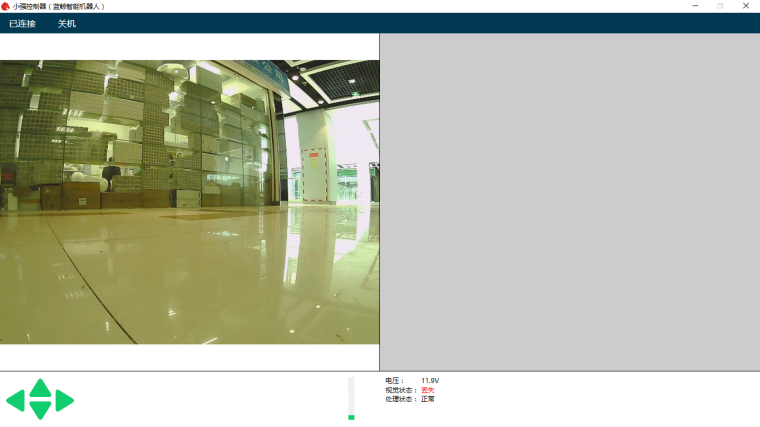
小强ROS机器人教程(6)___小强图传遥控Windows客户端
-
2017年3月份之前收到小强的用户,安装前请参考帖子升级软件包以支持小强图传遥控app
目前Windows客户端已改为伽利略导航系统客户端,使用方法可以参照伽利略导航系统使用手册图传显示和控制界面
软件安装包下载连接
下载后双击安装,根据提示一直点继续就可以了。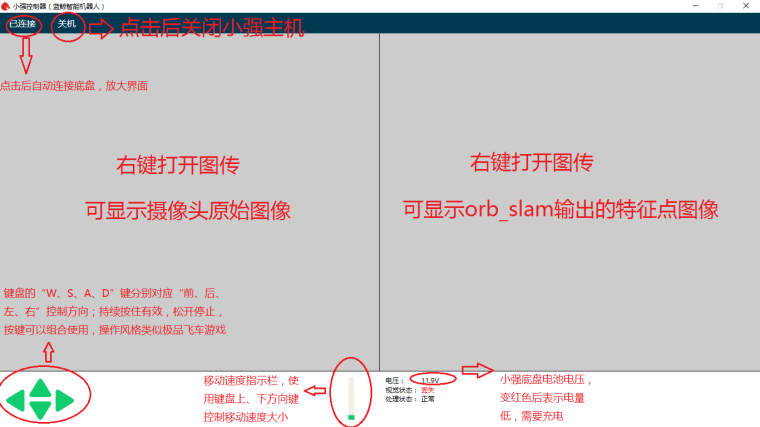
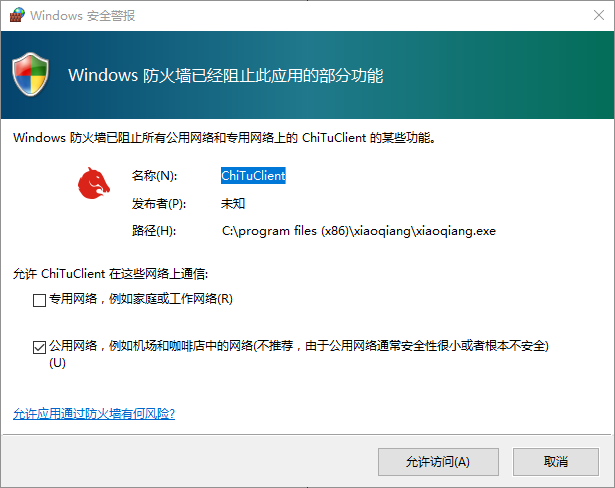
初次使用电脑会有如下提示,请勾选“专有网络和公用网络”后,点击选择“允许访问”
疑难解答
Q: 应用启动后无法连接
A: 可能是由于小强和你的电脑没有处在同一局域网下。也有可能是小强的服务端程序没有启动。可以输入 sudo service startup restart重启服务程序后再尝试。Q: 成功连接后无法遥控
A: 检查底盘驱动程序是否正常运行。检查底盘串口USB是否正常连接。然后输入bwcheck,看看自检是否有错误输出。如果自检正常但是还是无法移动,请检查红外是否触发。触发时红外传感器会发红光。Q: 成功连接后没有图传视频
A: 检查摄像头USB是否连接正常。然后重启服务后再试一次 sudo service startup restart。输入bwcheck,如果自检数据正常,此时仍然没有图像显示则说明客户端安装异常。请检查一下客户端的安装步骤。Q: 软件提示获取证书
A: 由于现在的服务端已经升级成伽利略导航版本,所以使用时需要证书。小强用户可以根据提示联系客服免费获取。