ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
二维码自动充电无法保存dockposition问题
-
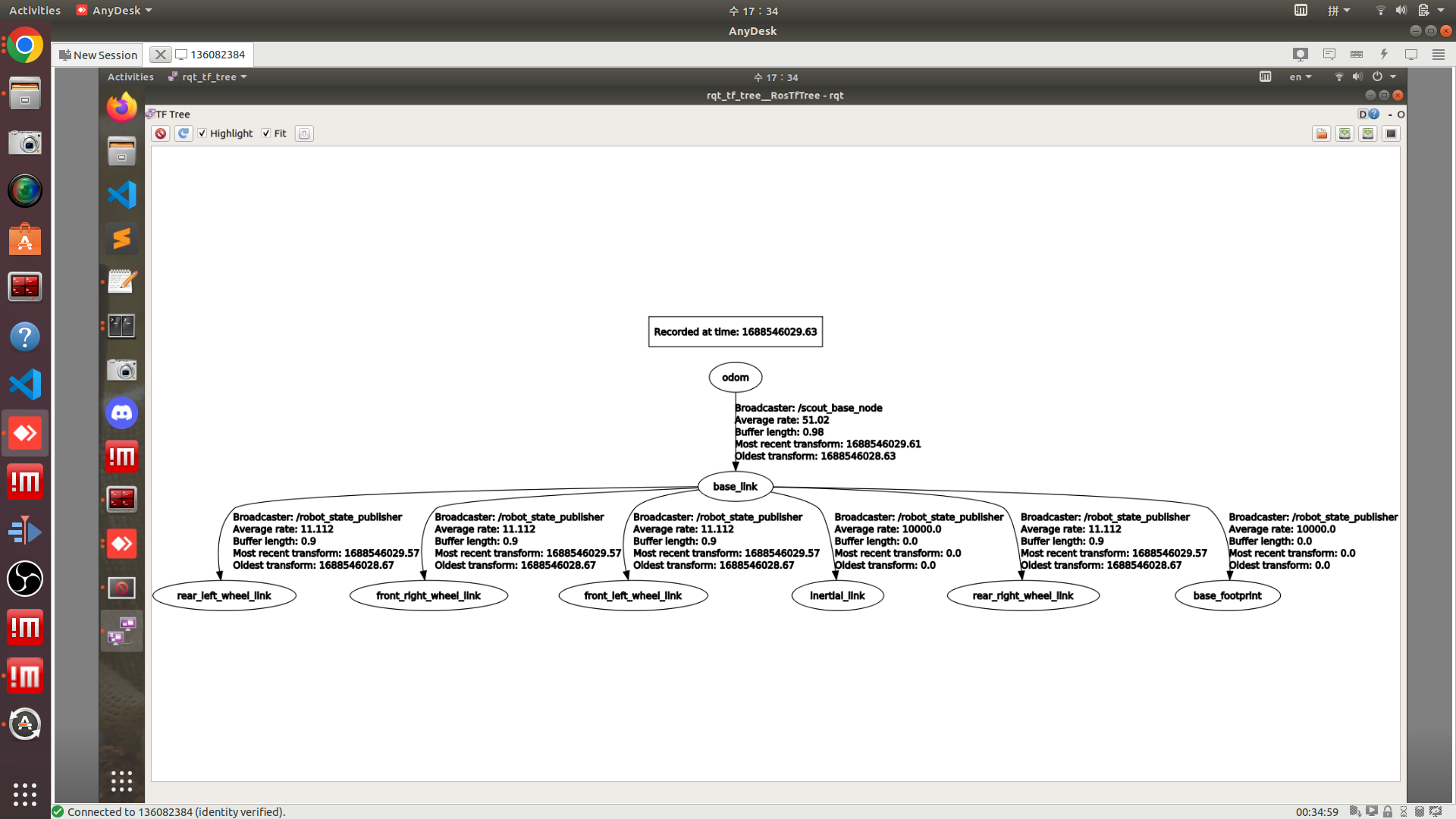
@weijiz 您好,我的rqt_tree如下,tf转换代码如下,应该怎么修改阿?仍然不能保存位置信息。
-
-
@yanyan1011-0 把baselink和basefootprint的之间的tf连接方法反过来。还有你的odom到baselink的tf是谁发布的,这个要改成odom到basefootprint
-
@weijiz 我的odom到base_link,是机器人发布的。
我的机器人的tf结构没办法改,我现在想在充电部分把base_link和base_footprint之间的tf反过来。如果按照我给您发的tf树,我应该如何修改代码? -
@yanyan1011-0 不行就改充电桩这边的代码,在代码里面搜basefootprint替换成baselink
-
@weijiz 能麻烦您告诉我改那个文件里的footprint吗?
-
@yanyan1011-0 这是静态tf,随便发布,不存在无法加的问题
-
@xiaoqiang @小助理 @weijiz
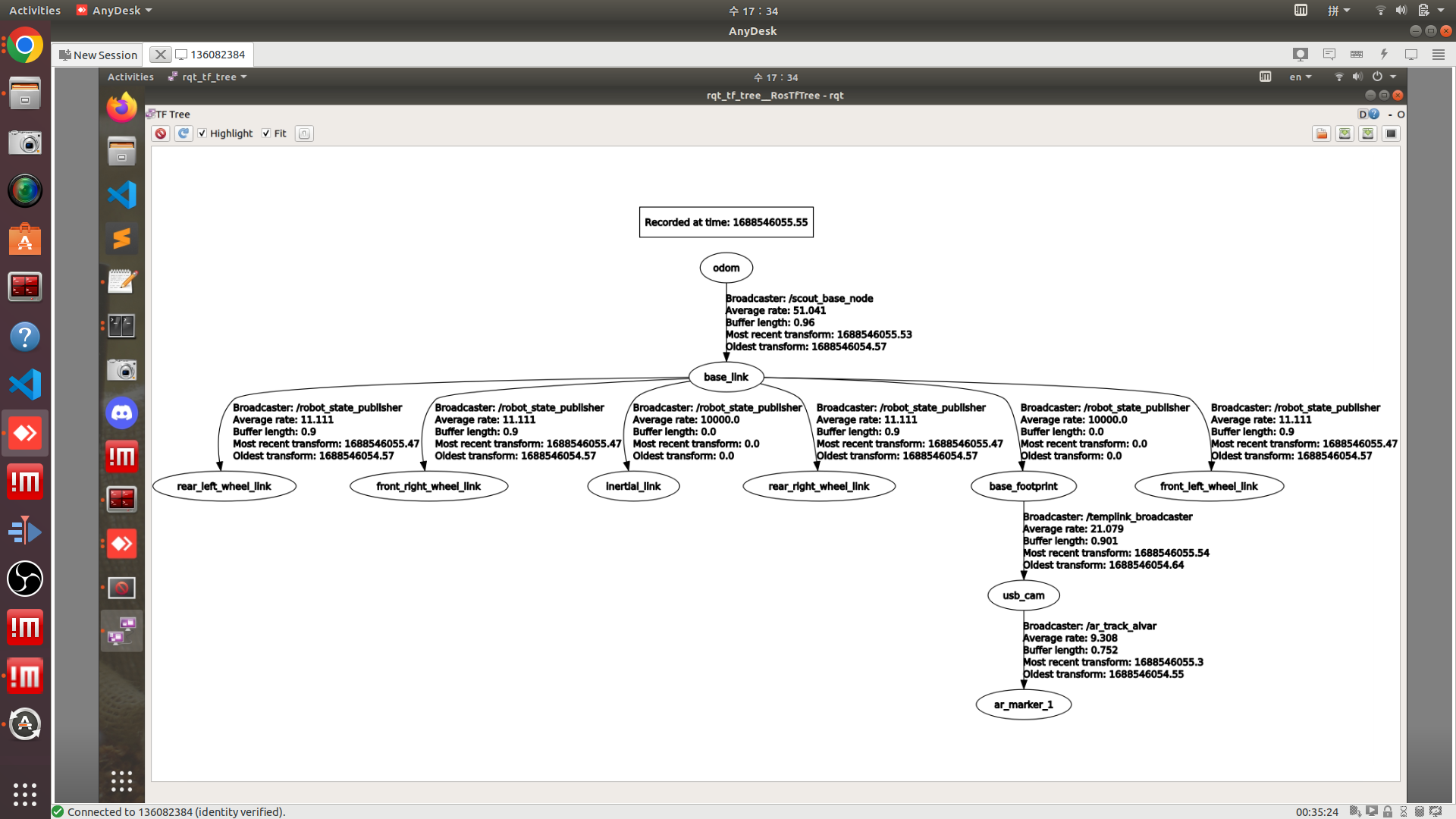
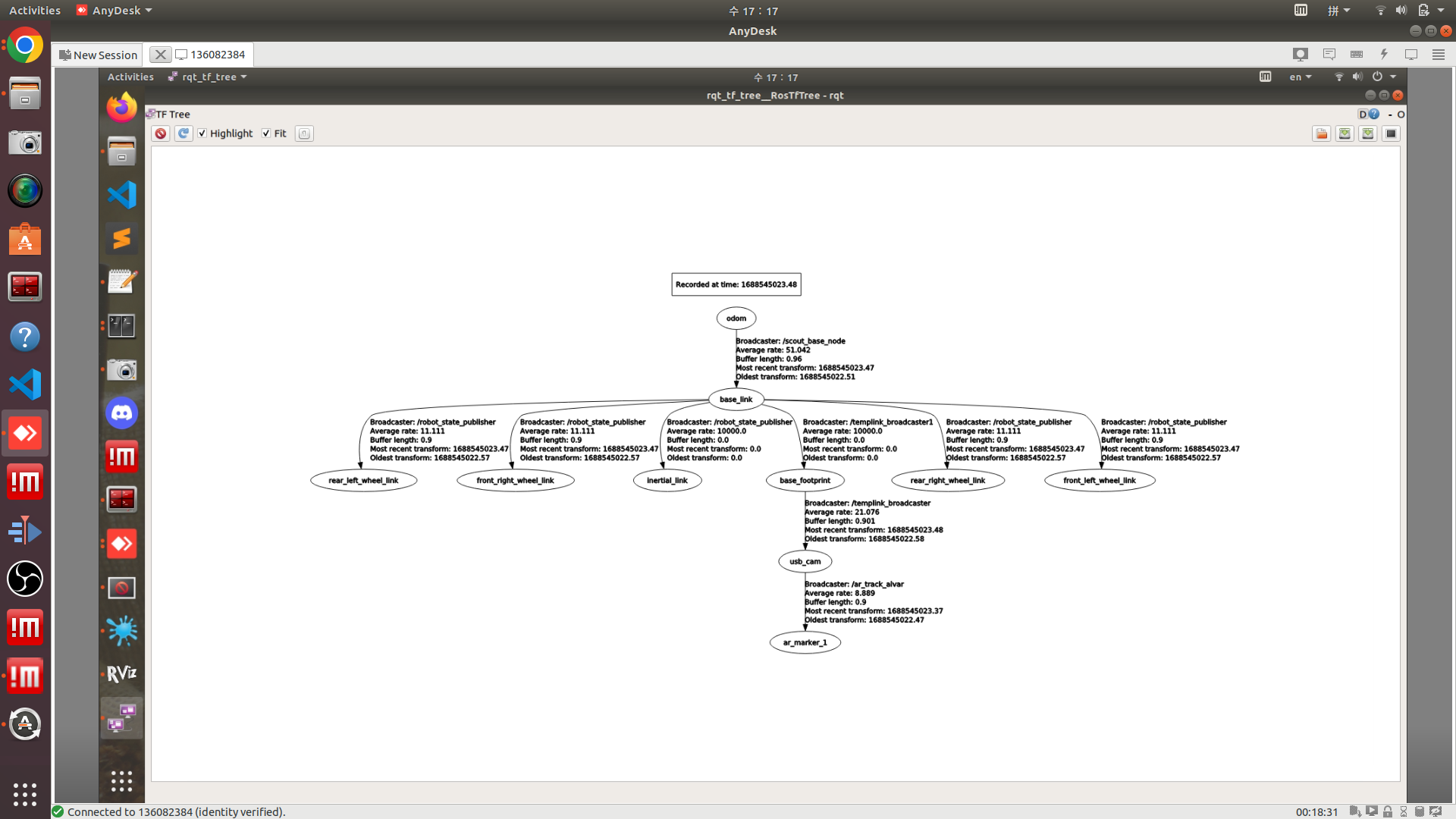
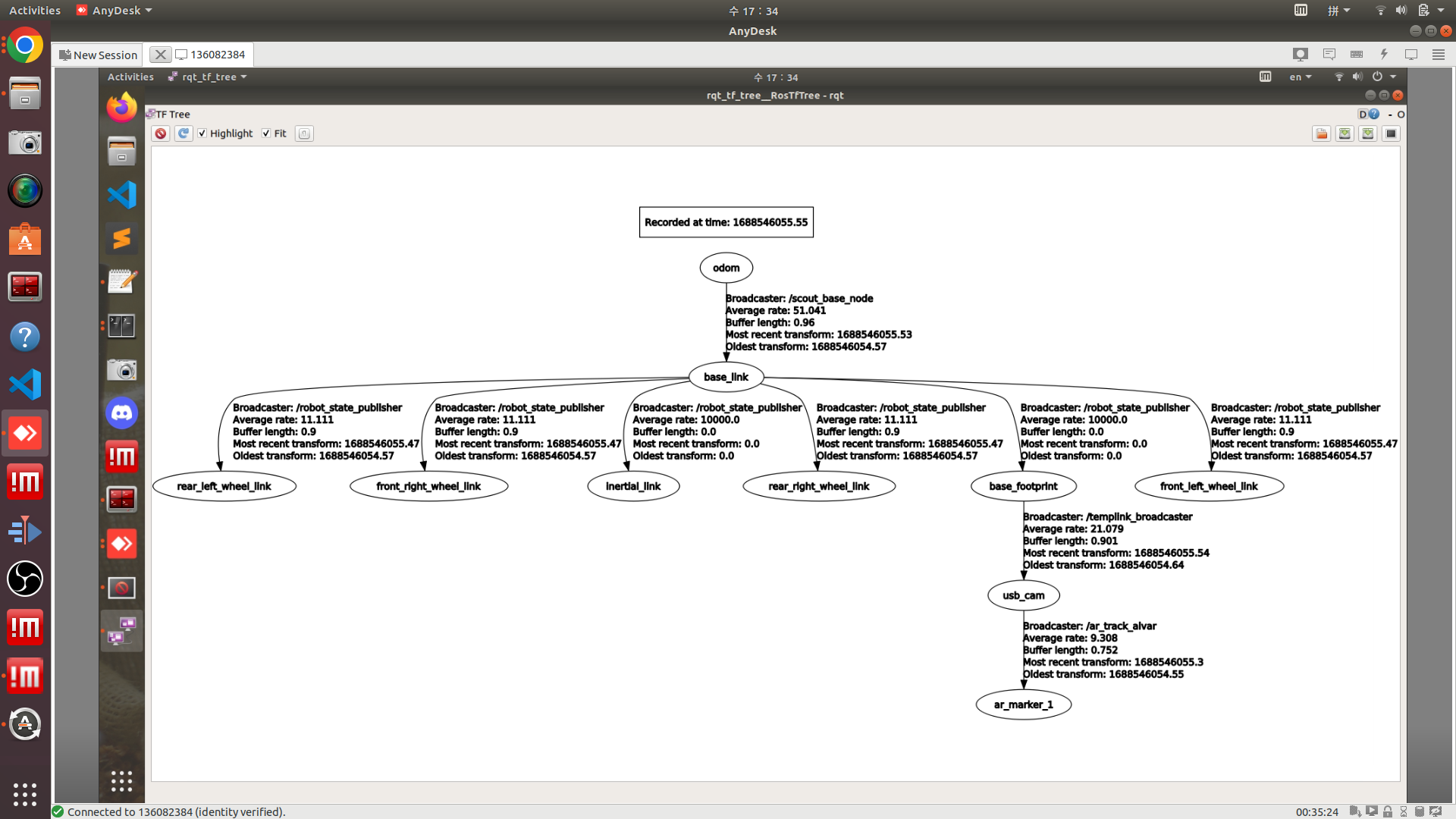
但为什么存不到dock_position呢?解决方法是什么呢?我的tf是这样的
-
@yanyan1011-0 tf树解决后,再解决其它问题,打印/ar_pose_marker话题,看是否识别了二维码,以及话题内的frame—id显示的是不是和设置的一样。
还有里程计话题里面的速度值要为零,节点会根据这个速度,判断车是否处于静止状态,处于运动状态也会不保存位置。 -
@xiaoqiang
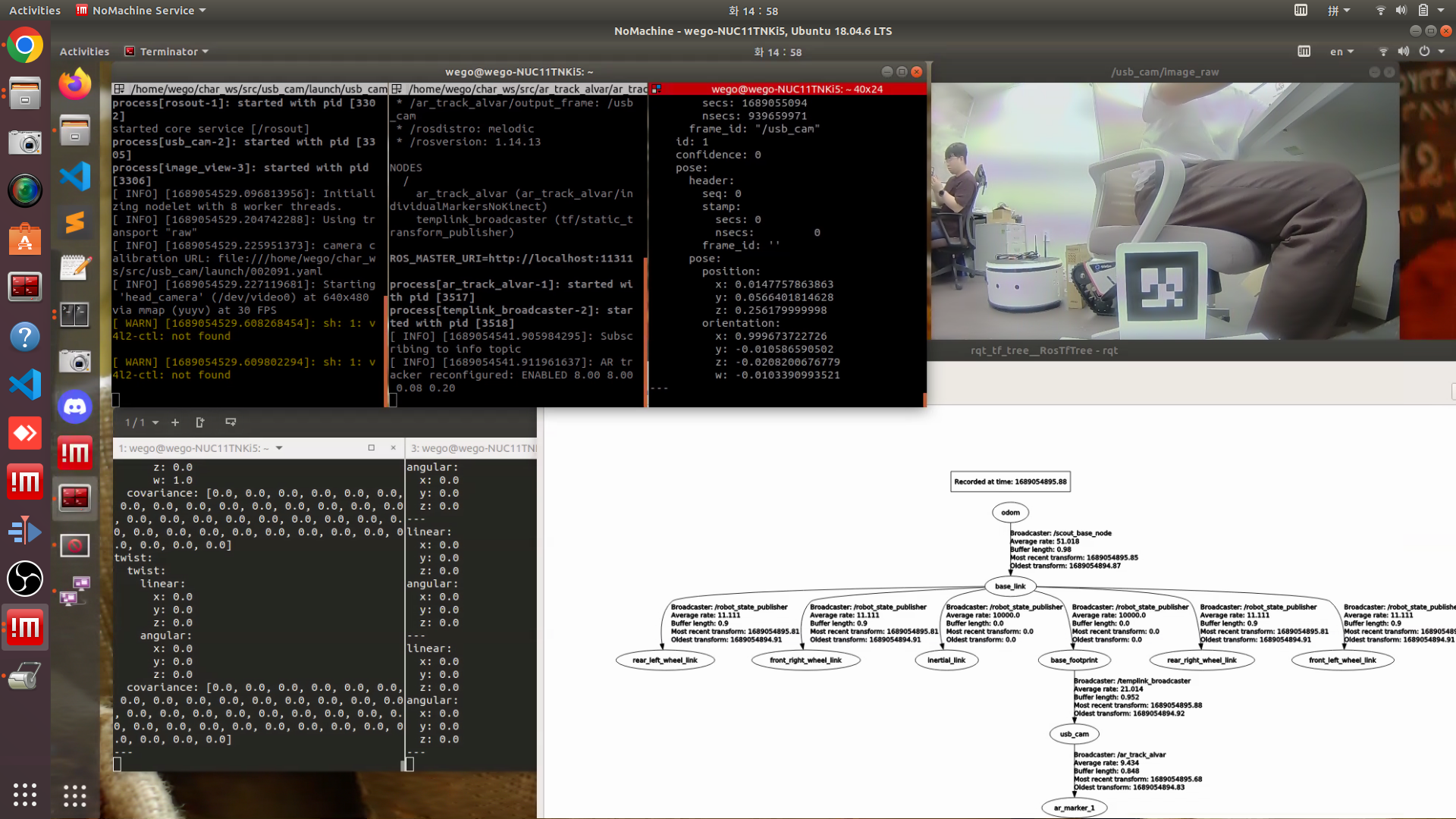
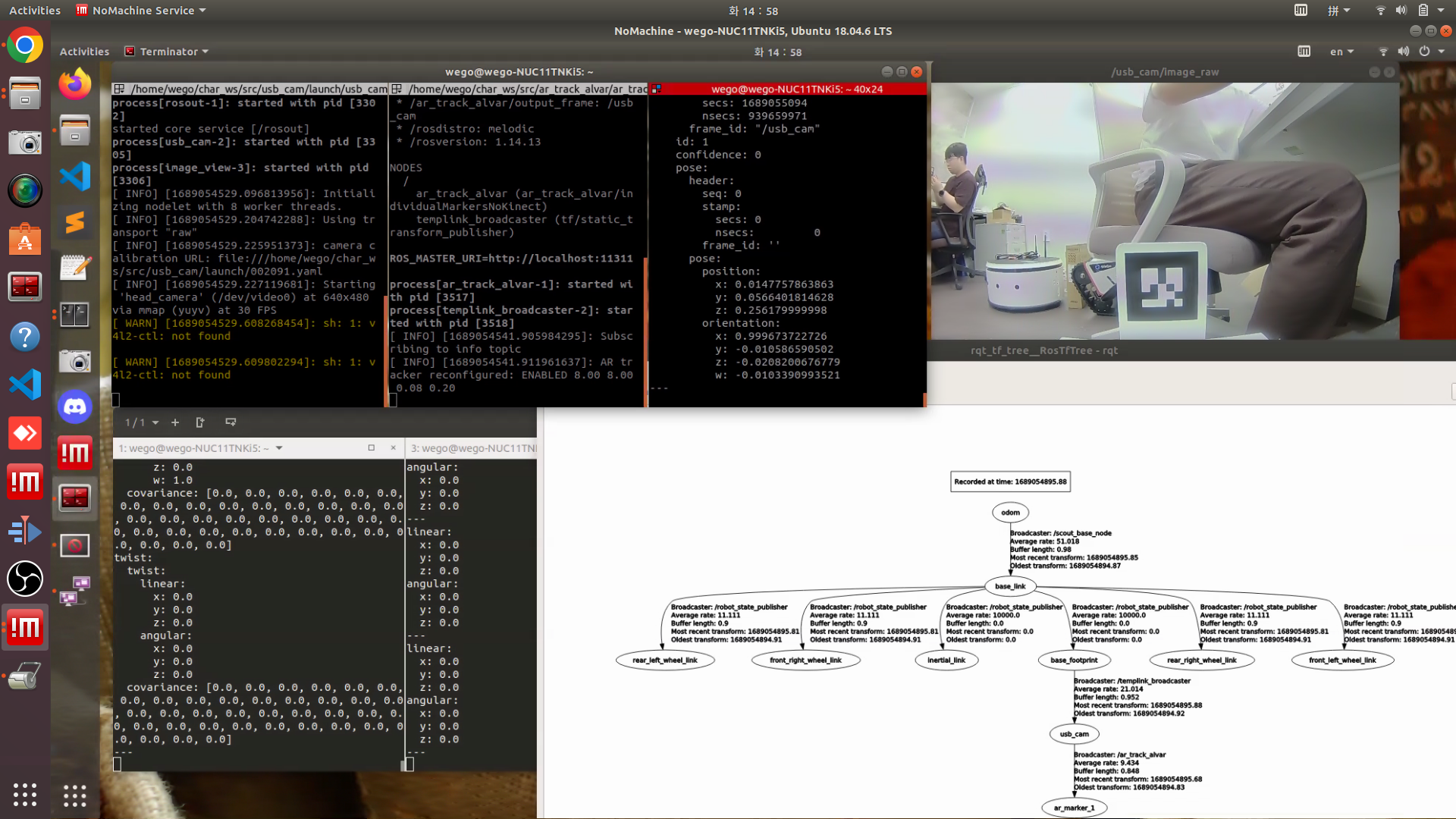
能识别ar_maker,id 为1.
有odomtopic,目前都为0.
cmd_vel,都为0.
rqt_tree如图,
-
@xiaoqiang @weijiz
能识别ar_maker,id 为1.
有odomtopic,目前都为0.
cmd_vel,都为0.
rqt_tree如图
-
@xiaoqiang @weijiz
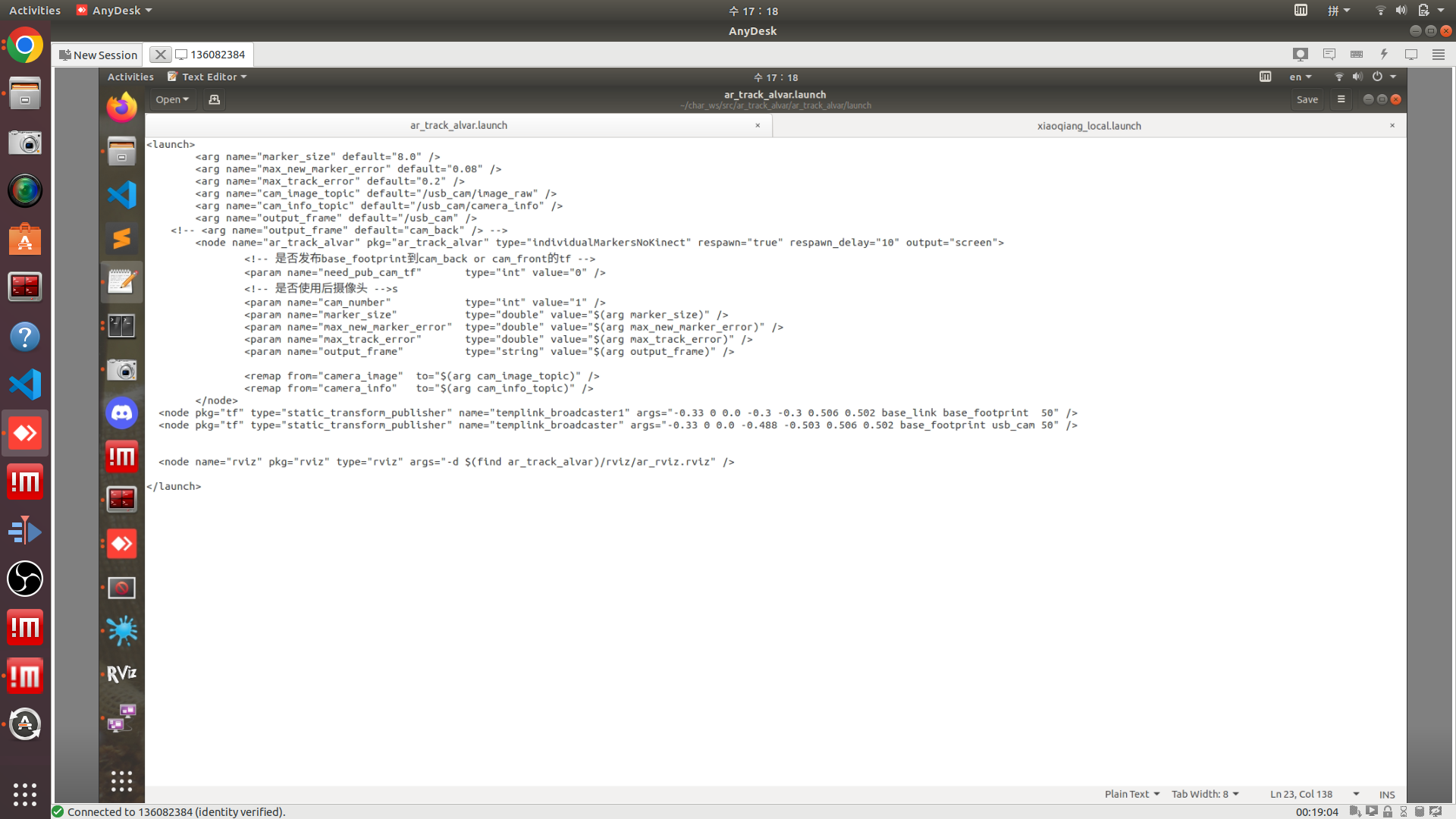
我已经检查了摄像头,二维码识别,odom,速度,全都工作良好。运行xiangqiang_local.launch文件,试图打印dock_position,没有任何输出,运行保存dock_position也没有任何数据。我想问一下,应该检查如下哪个文件?
 谢谢
谢谢
我现在觉得getDockPosition.cpp文件根本就没有subscribe任何topic。
您能提供一下测试好的正确代码吗?或者告诉我应该如何能修改现有代码,能保存充电桩位置。或者是您告诉我应该如何测验?来回来去还久了,能麻烦您提供一个有效的解决方法吗?谢谢 -
@yanyan1011-0 frame_id不要带/,如何查找话题是否订阅成功用rqt_graph、rosnode info工具确定。提供的代码很多用户已经成功使用了,卡在的地方是你们ros基础不扎实。
-
@yanyan1011-0 还不行就通过销售微信拉群远程演示一下
-
@xiaoqiang 麻烦您提供一个销售微信号,麻烦显示给我们看一下吧,谢谢。
-
@yanyan 18588452063