ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强开发版系统镜像下载
-
本教程已经过时,请看这篇文章的内容
使用时请注意选择合适自己设备的镜像里面包含了jade版本的ros以及各种针对小强的配置和优化。如果系统被损坏可以尝试用此镜像还原系统。
系统镜像
生成于2017-3-3镜像使用方法
下面以在虚拟机中如何安装此镜像为例说明镜像的使用方法。
在虚拟机中安装小强系统镜像后,请关闭开机启动项,避免与小强冲突sudo service startup stop rosrun robot_upstart uninstall startup下载镜像
从以上的链接中下载小强镜像。下载完成之后别忘了进行md5校验
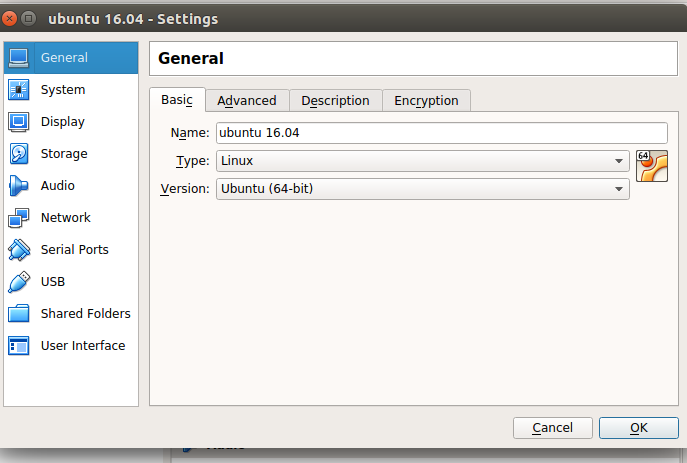
创建虚拟机
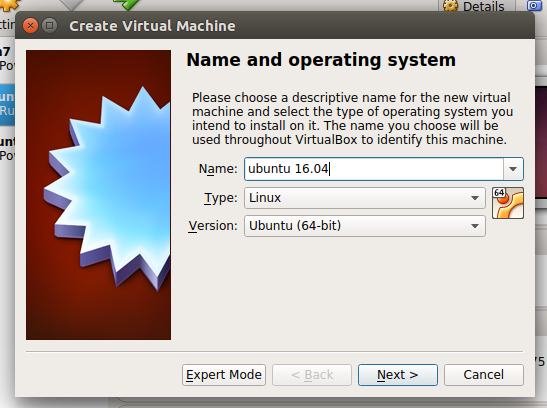
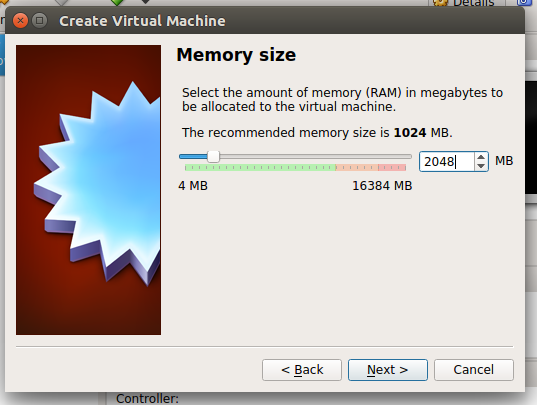
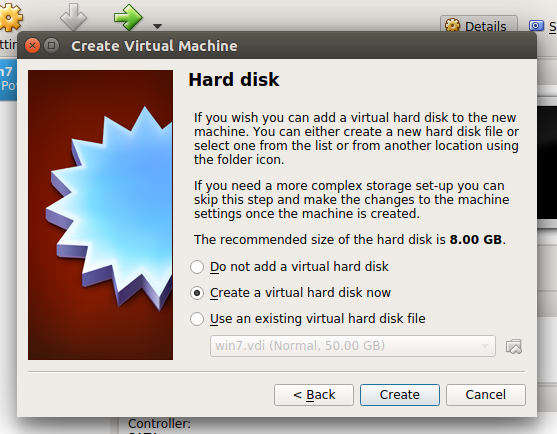
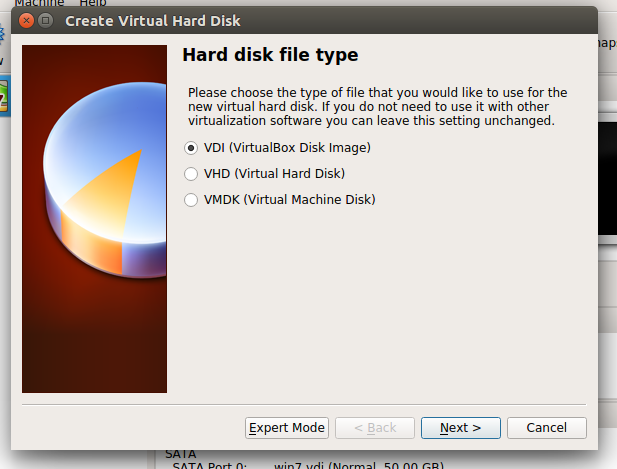
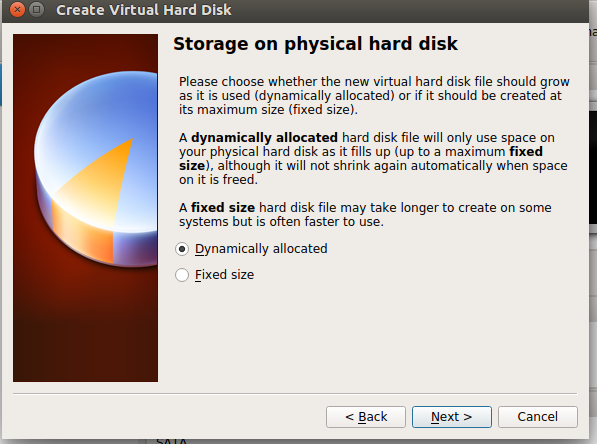
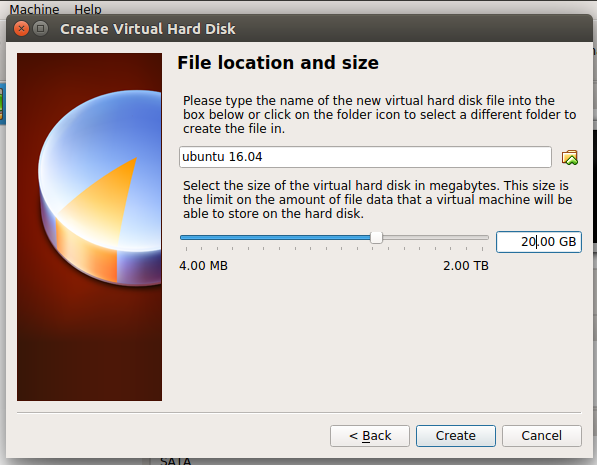
如图所示操作依次选择。
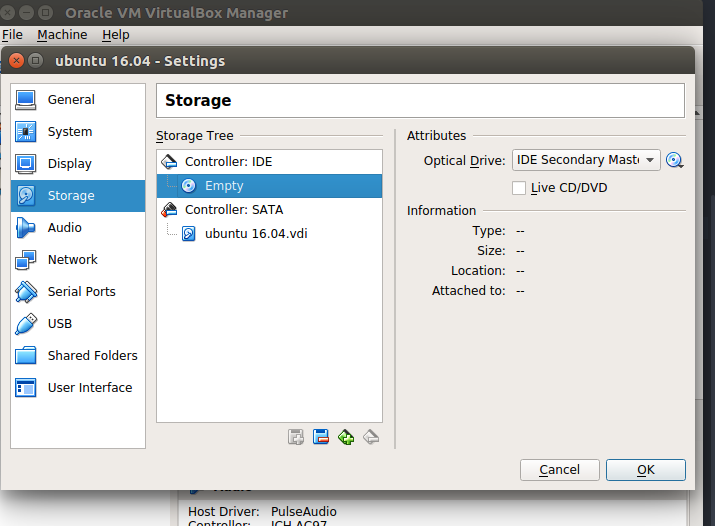
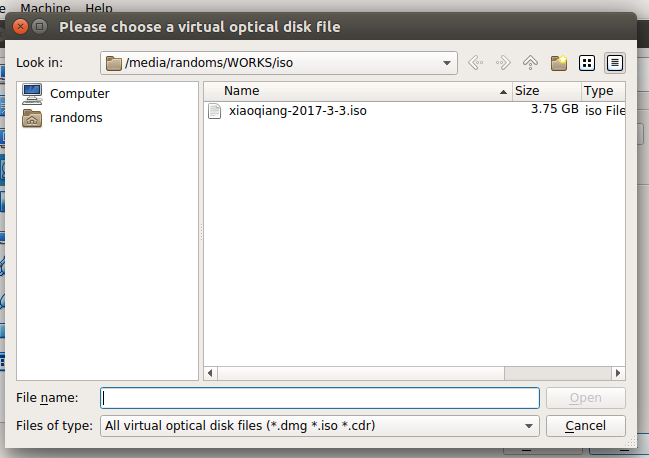
给虚拟机添加iso文件
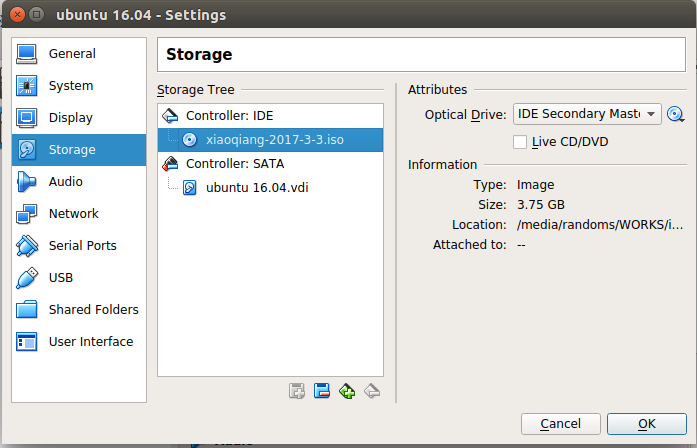
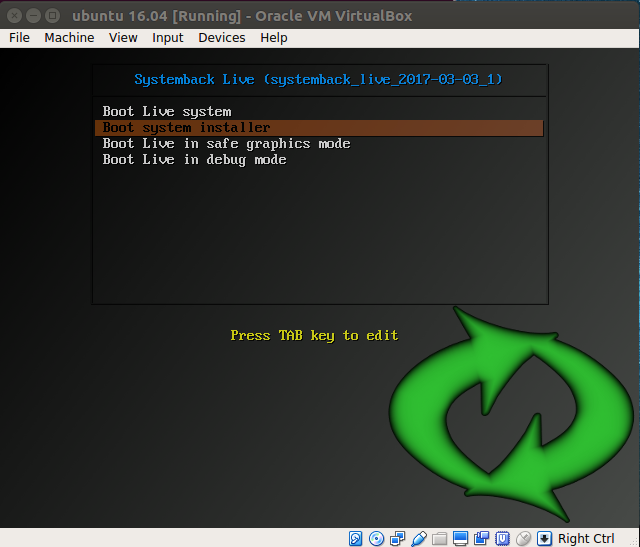
开始安装
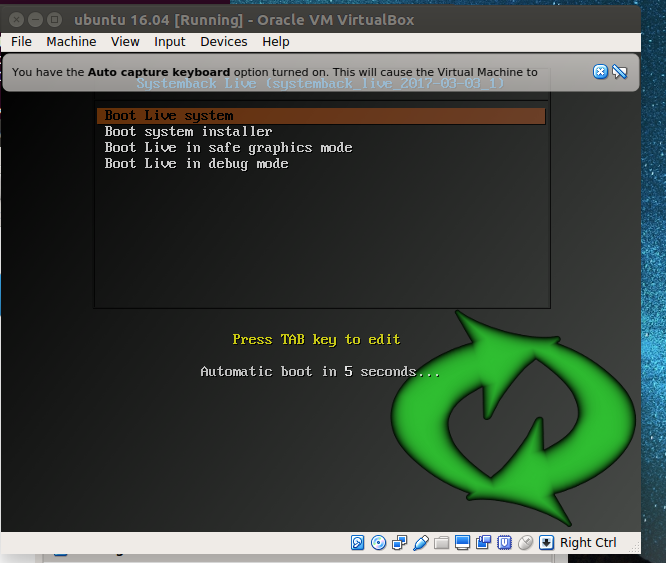
启动虚拟机
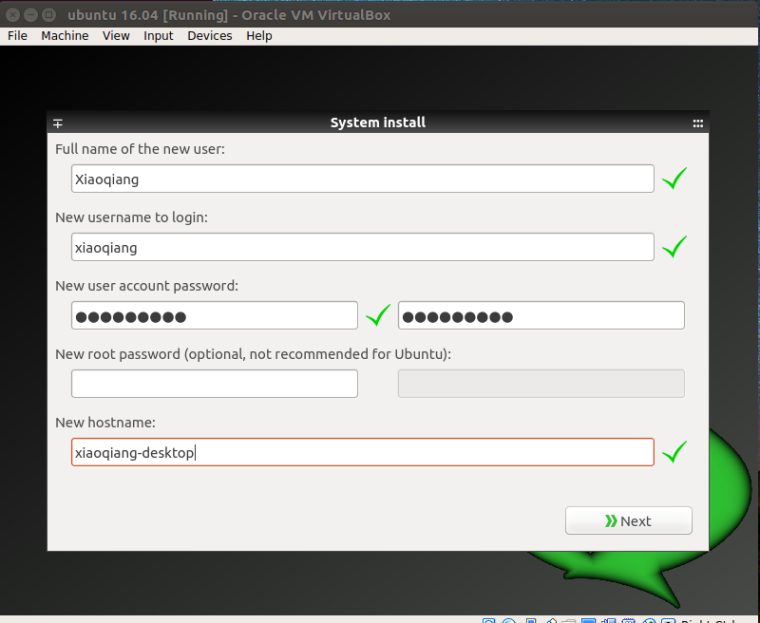
如上图类似设置,注意为了保证程序正常执行,根据系统安装位置选择对应设置
在小强主机上操作时:用户名一定要是xiaoqiang,计算机名一定要是xiaoqiang-desktop
在自己电脑上操作时:用户名一定要设为xiaoqiang,计算机名设为bluewhale-client下一步进行分区,注意勾选上
Transfer user configuration and data files
点击下一步进入分区界面。
选中你要安装的硬盘,然后点击Delete按钮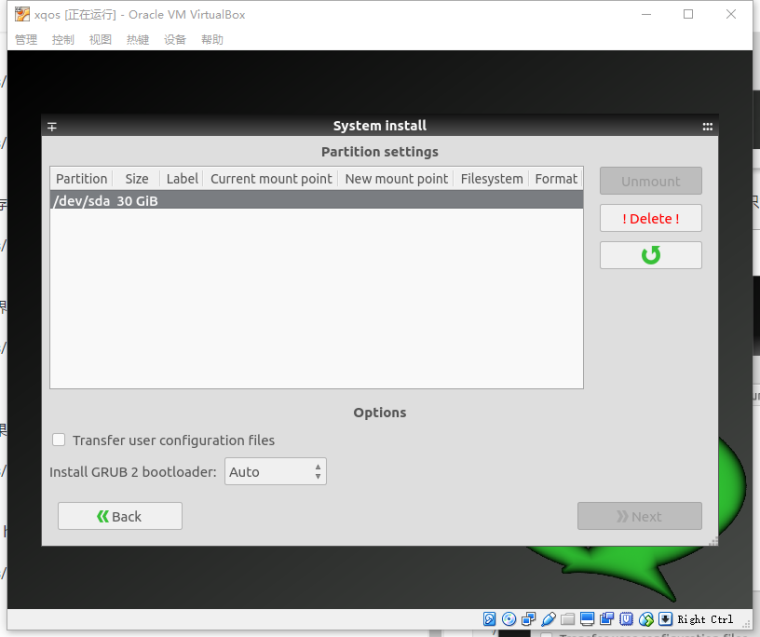
再次选择硬盘中的新分区
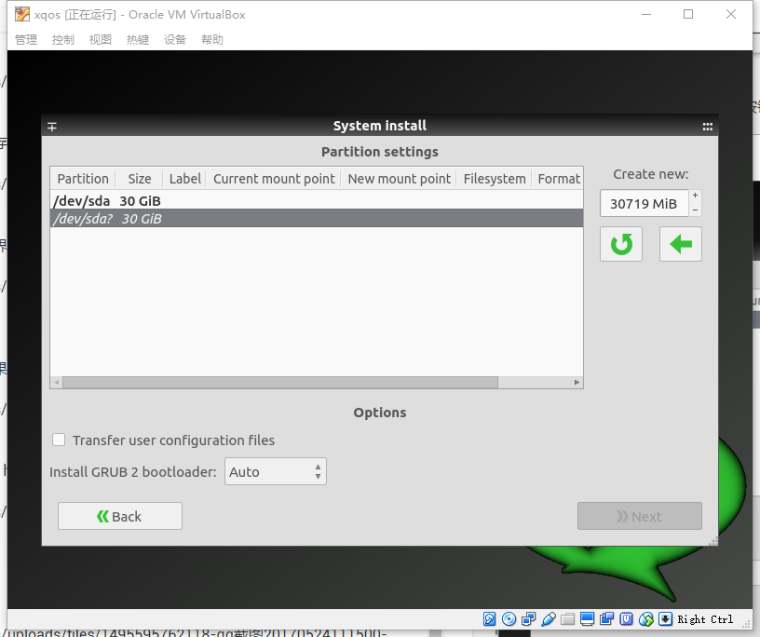
点击箭头进入下一步
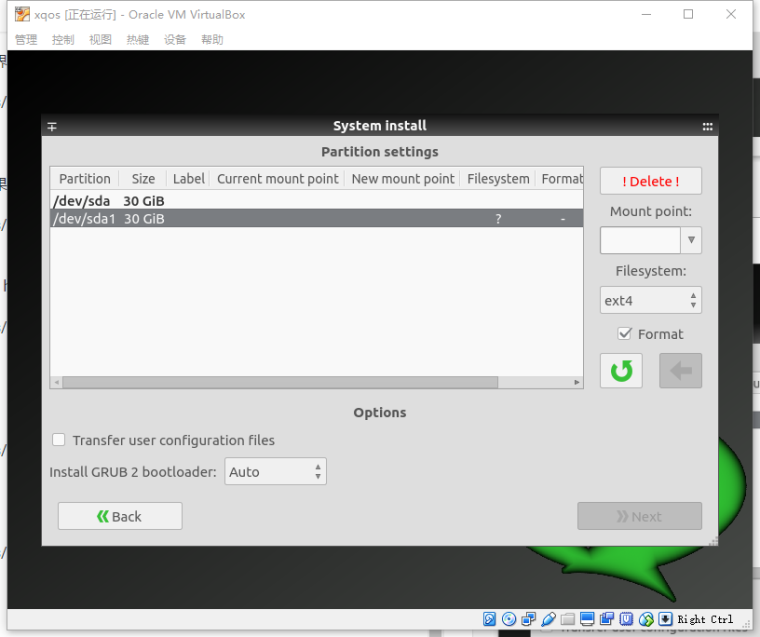
再次选择刚才新建的分区
设置右侧的Mount point,再次点击箭头进入下一步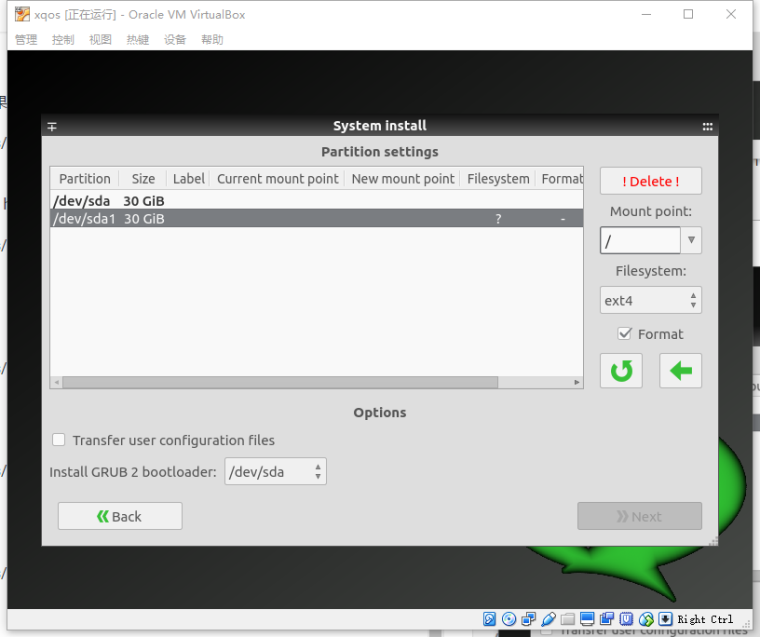
等待安装完成就可以了
安装完成之后
安装后重启。安装完成之后可能会提示有一些错误,这是由于里面的一些残留文件导致的,可以把这些文件删除。在终端输入
sudo rm -rf /var/crash/*然后再次重启,就可以了

在虚拟机中安装小强系统镜像的用户,请关闭开机启动项,避免与小强冲突
sudo service startup stop rosrun robot_upstart uninstall startupEnjoy it

-
这个镜像是不是 有问题呢?我在虚拟机里 装都装不了这系统 装的时候一直等都没反应 请问还有之前版本的吗
-
不会有问题的,不仅在虚拟机里面测试了,还在实际的电脑上安装过。你是卡在什么地方了?
-
@咸菜 注意镜像要求单独的boot分区
-
@weijiz sda assuming drive cache write through
-
@咸菜 在 小强开发版系统镜像下载 中说:
sda assuming drive cache write through
好像是上传百度云的时候文件被损坏了,我又重新传了一遍。下载完成后最好做一下md5校验
md5的值是d4495de491ee22e1f424988b67202013 -
上传好 麻烦告知下 谢谢
-
@咸菜 已经上传好了,最上面的链接地址就是
-
@weijiz 下载了 还是一样 很奇怪 我装其他版本ubuntu可以正常使用
装您百度云里的这个 到 ststemback live 这个选择界面 不管选择什么都是进入黑屏方便加下您的QQ吗 或者您加我的 QQ:839553510 -
不想在虚拟机上装,想直接给电脑安装Linux系统。这样需要先安装Ubuntu吗?还是直接在U盘里刻录小强的镜像文件,再安装。
-
@贝壳 直接安装就可以了,这个iso本身是一个完整的ubuntu系统
-
@frank 请问下想让电脑进入U盘启动模式,按什么快捷键呢?
-
@贝壳 一般电脑按f2、f10、f11这三个键中的一个,小强pro是f11,有其它问题欢迎进入技术群538456117询问