ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
原装和国产ps3手柄ros驱动程序
-
@xiangxiang123 多次短按试试,第1步是绑定(只用绑定一次),第2步才是配对(每次重启机器后都要操作一次)。第1步绑定成功后,断开usb和手柄连接,重启系统,然后直接进行第2步操作
-
-
有线连接
jstest-gtk
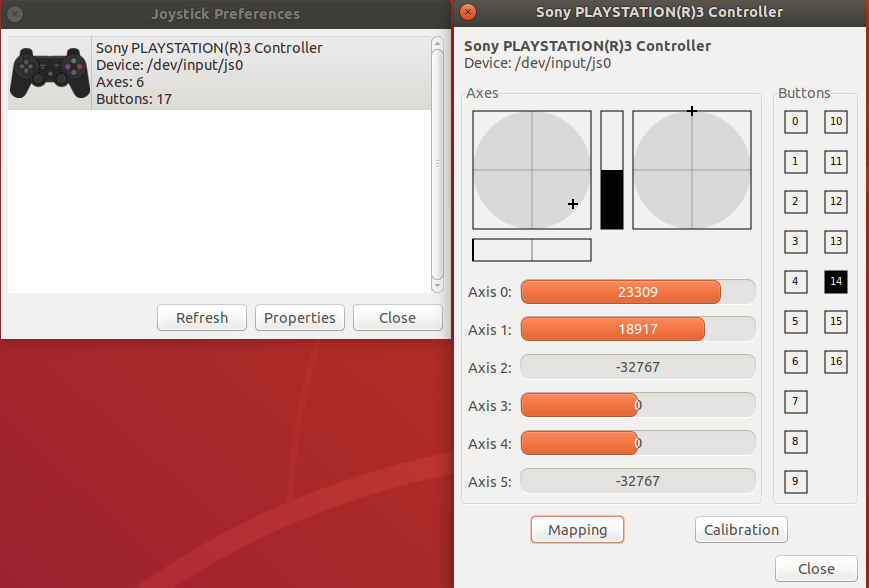
测试没有问题,图中为左边摇杆的数据。
问题:有时候手柄会和电脑自动断开。 -
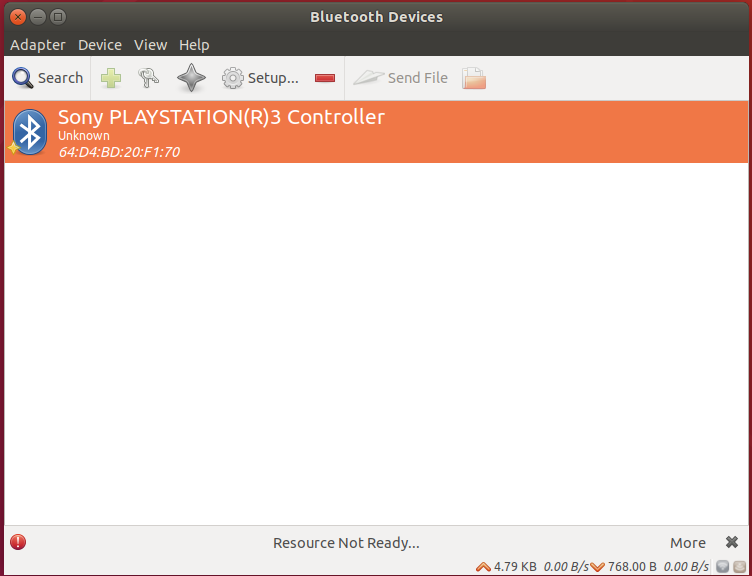
bluetooth连接
a. 安装蓝牙驱动以及图形工具,插入手柄USB,查看如下
b.将手柄与usb蓝牙适配器进行绑定
sudo bash
rosrun ps3joy sixpair
Current Bluetooth master: 00:1a:7d:da:71:10
Setting master bd_addr to 00:1a:7d:da:71:10
绑定成功。c. 将手柄与usb蓝牙适配器配对
按照步骤:断开usb后,先等配对指示灯不闪后,再执行“rosrun ps3joy ps3joyfake_node.py”,最后按手柄配对键就可以配对了。
问题:在执行“rosrun ps3joy ps3joyfake_node.py”后,显示如下
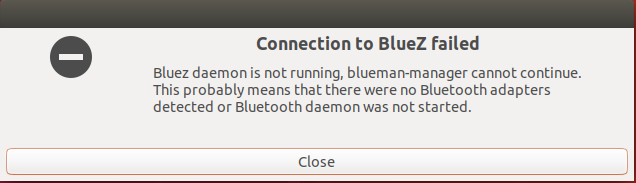
无法连接蓝牙。 -
-
@Taiping 在 原装和国产ps3手柄ros驱动程序 中说:
-
有线连接
jstest-gtk
测试没有问题,图中为左边摇杆的数据。
问题:有时候手柄会和电脑自动断开。 -
bluetooth连接
a. 安装蓝牙驱动以及图形工具,插入手柄USB,查看如下
b.将手柄与usb蓝牙适配器进行绑定
sudo bash
rosrun ps3joy sixpair
Current Bluetooth master: 00:1a:7d:da:71:10
Setting master bd_addr to 00:1a:7d:da:71:10
绑定成功。c. 将手柄与usb蓝牙适配器配对
按照步骤:断开usb后,先等配对指示灯不闪后,再执行“rosrun ps3joy ps3joyfake_node.py”,最后按手柄配对键就可以配对了。
问题:在执行“rosrun ps3joy ps3joyfake_node.py”后,显示如下
无法连接蓝牙。
@xiaoqiang 请帮助解决一下,蓝牙设备连接的问题吧,谢谢! -
-
@Taiping 不清楚具体原因,没遇到这种情况。可能蓝牙设备被你系统其他程序占用了
-
@xiaoqiang 完全没有其他蓝牙连接,我用sixad连接:
sixad -s
Can’t read version info hci0: Connection timed out (110)
Can’t set scan mode on hci0: Connection timed out (110)
是不是因为蓝牙的问题,购买的蓝牙不同版本使得在Ubuntu 18.04上不好使?rfkill list
0: hci0: Bluetooth
Soft blocked: no
Hard blocked: nodmesg | grep Bluetooth
[ 21.196279] Bluetooth: Core ver 2.22
[ 21.196295] Bluetooth: HCI device and connection manager initialized
[ 21.196300] Bluetooth: HCI socket layer initialized
[ 21.196302] Bluetooth: L2CAP socket layer initialized
[ 21.196304] Bluetooth: SCO socket layer initialized
[ 45.252264] Bluetooth: BNEP (Ethernet Emulation) ver 1.3
[ 45.252267] Bluetooth: BNEP filters: protocol multicast
[ 45.252276] Bluetooth: BNEP socket layer initialized
[ 45.268452] Bluetooth: RFCOMM TTY layer initialized
[ 45.268462] Bluetooth: RFCOMM socket layer initialized
[ 45.268469] Bluetooth: RFCOMM ver 1.11
[ 161.085862] Bluetooth: hci0: command 0x0c1a tx timeout
[ 330.974016] Bluetooth: hci0: command 0x0c52 tx timeout
[ 887.742238] Bluetooth: hci0: command 0x0c1a tx timeout
[ 889.758240] Bluetooth: hci0: command 0x0c13 tx timeout
[ 891.774231] Bluetooth: hci0: command 0x0c52 tx timeout
[ 912.510248] Bluetooth: hci0: command 0x0c1a tx timeout
[ 914.526244] Bluetooth: hci0: command 0x0c13 tx timeout -
@Taiping 在 原装和国产ps3手柄ros驱动程序 中说:
Bluetooth: hci0: command 0x0c1a tx timeout
有16.04的机器吗,试试16.04。同时lsusb看一下蓝牙设备