ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
教程20里面出现的问题
-
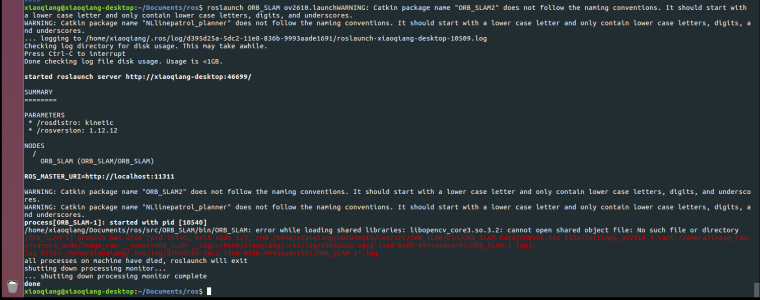
我在输入 roslaunch ORB_SLAM ov2610时无法成功运行

-
-
你好,我按照你说的更新了,并提升更新成功,但是还是无法运行
-
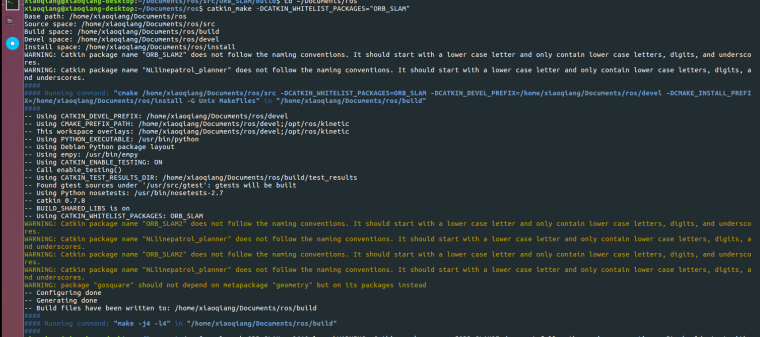
@rockyren 你需要再重新编译一下ORB_SLAM
cd ~/Documets/ros/src/ORB_SLAM git pull sudo sed -i -r 's#set\(OpenCV_LIBS \$\{OpenCV_LIBS\} "\$\{__cvcomponent\}"\)#set\(OpenCV_LIBS \$\{OpenCV_LIBS\} "\$\{OpenCV_INSTALL_PATH\}/lib/lib\$\{__cvcomponent\}3.so")#' /opt/ros/kinetic/share/OpenCV-3.3.1/OpenCVConfig.cmake mkdir build cd build cmake .. -DROS_BUILD_TYPE=Release make cd ~/Documents/ros catkin_make -DCATKIN_WHITELIST_PACKAGES="ORB_SLAM" -
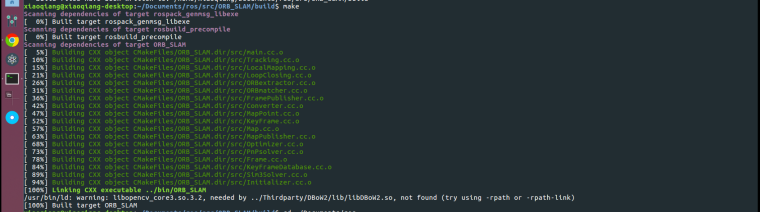
你好,我在按照上面的过程都执行了一遍以后还是发现无法运行。具体如下:

-
@rockyren

你在编译的时候有这个错误。因为ORB_SLAM中opencv的预编译版本的和你自己编译的版本不一样。你要重新编译DBOW2# 编译 DBOW2 cd Thirdparty/DBoW2 mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make # 编译 ORB_SLAM cd ../../ mkdir build cd build cmake .. -DROS_BUILD_TYPE=Release make # 编译catkin包 cd ~/Documents/ros catkin_make -DCATKIN_WHITELIST_PACKAGES="ORB_SLAM" -
感谢,按照上面的步骤已经能够重新运行 roslaunch ORB_SLAM ov2610,不过按照教程20继续走,又在这一步出了问题,麻烦看一下是什么情况?

-
@rockyren scipy没有安装
sudo pip install scipy -
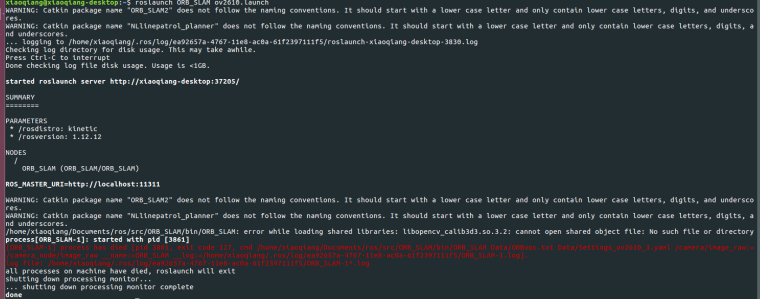
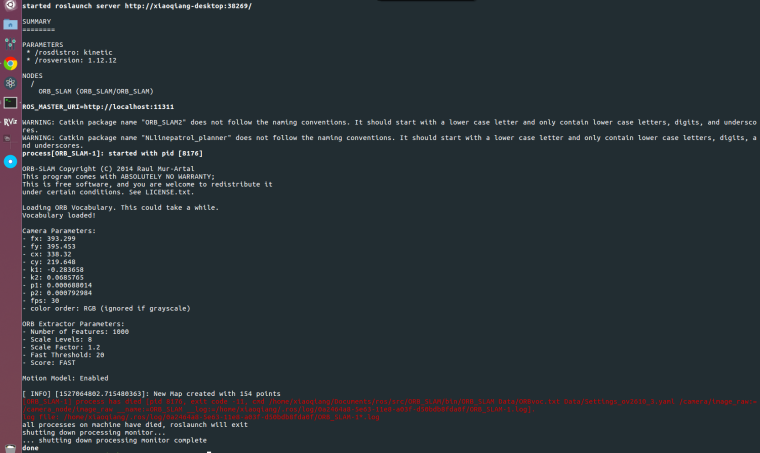
还是有新的问题(
 ),我在运行roslaunch ORB_SLAM ov2610后,该命令行窗口会停留在Model Motion:enable处,然后再另一个窗口运行rosrun orb_init orb_scale.py之后,原来的那个窗口就会报错
),我在运行roslaunch ORB_SLAM ov2610后,该命令行窗口会停留在Model Motion:enable处,然后再另一个窗口运行rosrun orb_init orb_scale.py之后,原来的那个窗口就会报错
。

-
@rockyren 这个是程序崩溃了,你可以单独执行 错误里面cmd后面的指令,看看输出是什么。

-
@RockyRen 想问你下,你在运行ubuntu时,这个界面时怎么截图的
-
@xiaoxutongxie 可以按Print Screen 按钮
-
@RockyRen 请问一下你解决程序崩溃问题了吗,我也是最后出现进程错误