ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强底盘驱动xqserial_server发布的IMU数据简介
-
最新版本的xqserial_server驱动包增加了IMU话题的发布功能,现在小强上电开机后,将以50hz的频率发布IMU话题数据。
话题名字是:/xqserial_server/IMU
话题所在frame_id: imu
imu到base_link的tf关系的设置参数在xqserial.launch文件里面1.驱动包更新
roscd xqserial_server git stash git pull cd .. cd .. catkin_make2.重启startup任务,现在可以使用/xqserial_server/IMU话题了
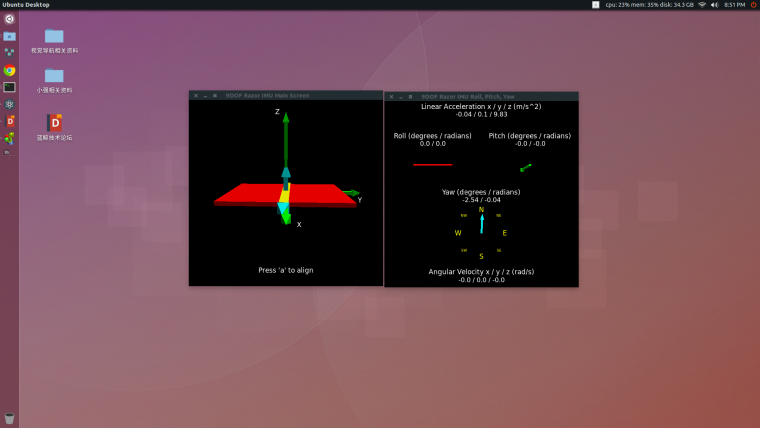
可以使用rostopic工具查看话题数据

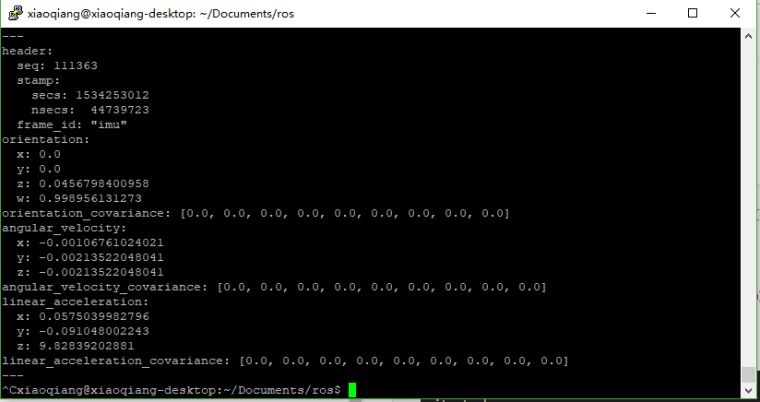
还可以使用python脚本可视化话题数据rosrun xqserial_server visualization.py