ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
DSO_SLAM进行三维建模遇到问题
-

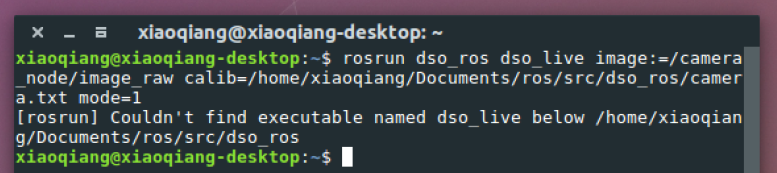
问题1、执行rosrun dso_ros dso_live image:=/camera_node/image_raw calib=/home/xiaoqiang/Documents/ros/src/dso_ros/camera.txt mode=1出错,如下图
问题2、rosbag录制/camera_node/image_raw这个image topic数据,然后重放,
具体怎么操作,
首先是录制,录制完之后怎么保存,保存完之后如何进行重放,请给出具体指令 -
-
关闭摄像头节点执行重放出现错误
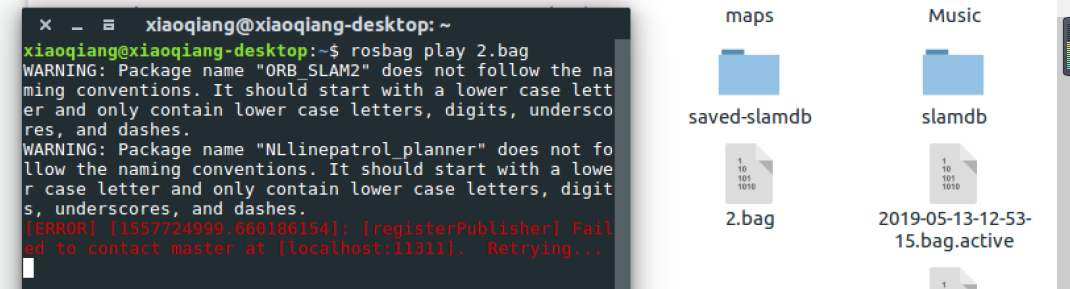
还有一个问题就是rosbag录制之后,出现.bag.active文件,这是怎么回事,不应该是bag文件吗
-
@孙超越a active文件是录制bag的临时文件。正常rosbag程序退出时这个文件会被删除。如果不正常退出,这个文件会保留。