关闭摄像头节点执行重放出现错误
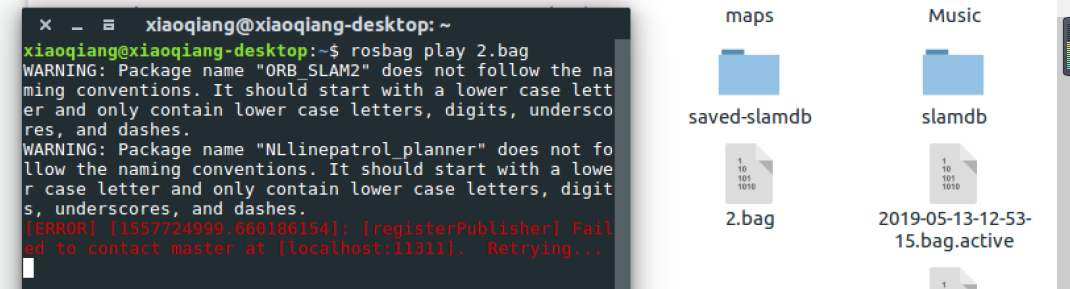
还有一个问题就是rosbag录制之后,出现.bag.active文件,这是怎么回事,不应该是bag文件吗
关闭摄像头节点执行重放出现错误
还有一个问题就是rosbag录制之后,出现.bag.active文件,这是怎么回事,不应该是bag文件吗

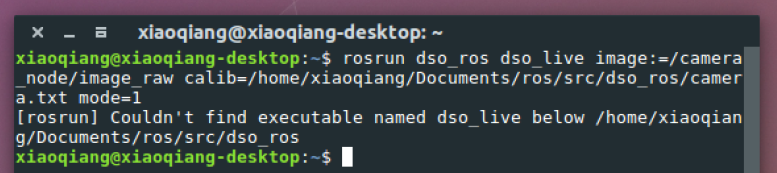
问题1、执行rosrun dso_ros dso_live image:=/camera_node/image_raw calib=/home/xiaoqiang/Documents/ros/src/dso_ros/camera.txt mode=1出错,如下图
问题2、rosbag录制/camera_node/image_raw这个image topic数据,然后重放,
具体怎么操作,
首先是录制,录制完之后怎么保存,保存完之后如何进行重放,请给出具体指令
1、这是我给超声波模块设置的udev规则,单独创建了99-bw_sensors-usb.rules文件
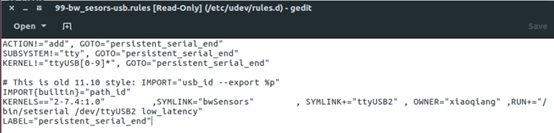
2、这是ls /dev 出现了bwSensors
3、roslaunch bw_sensors bw_sensors.launch 启动失败