您好,想问一下爪子这个电机之前用到过热,然后再用反应就不够灵敏了,是电机烧了吗还是爪子自己的问题。
如果更换电机可以机械臂内部更换吗,比如说把最下部电机和爪子电机互换。@xiaoqiang @kadian
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Arieszzh 发布的帖子
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务

-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
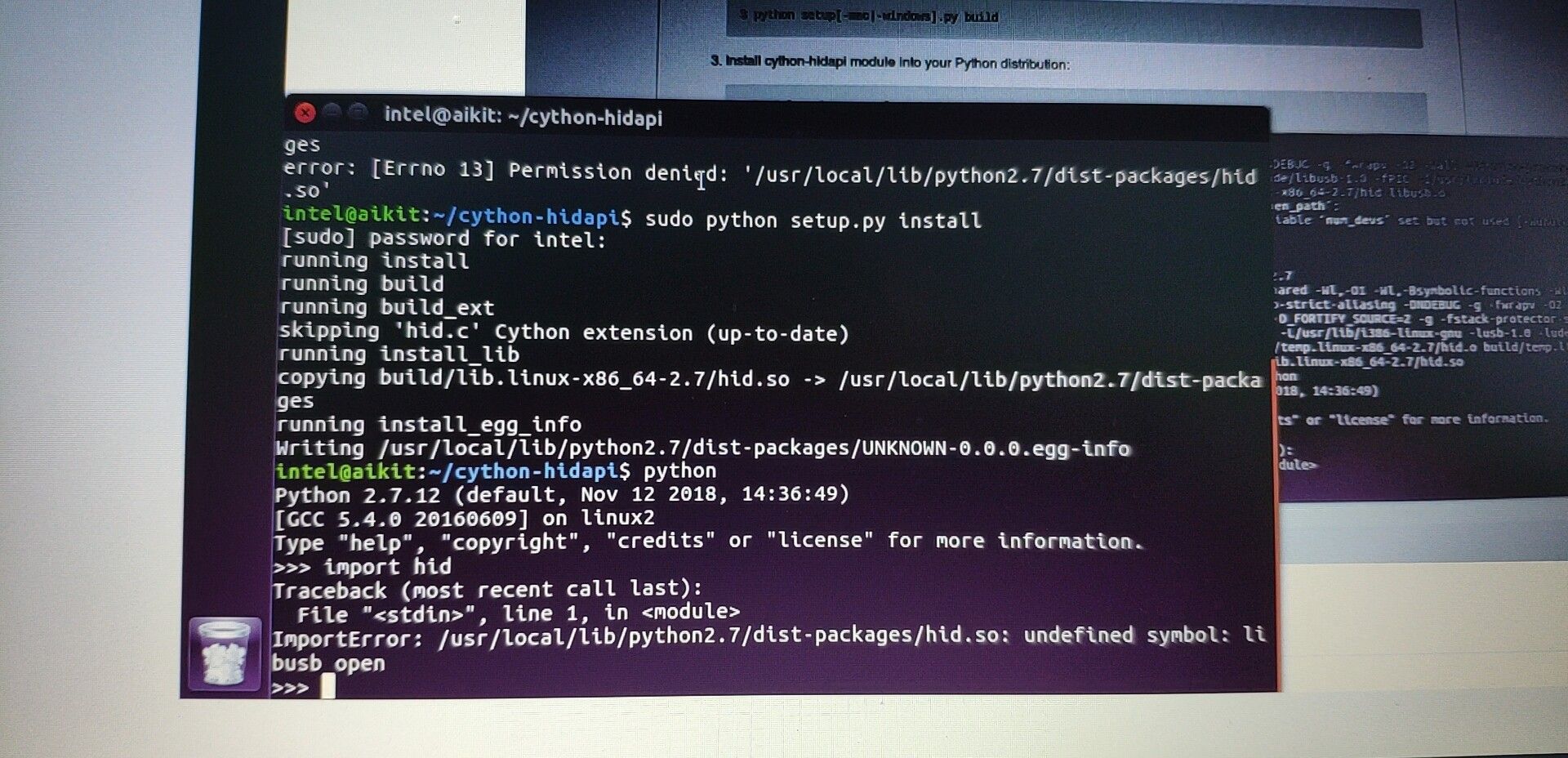
不知道这里怎么上传,我用邮箱发给你吧。好像是要把原来的hid先卸载再复制新的hid.so到/usr/local/lib/python2.7/dist-packages@kadian
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
指令已经更改,但是用python检测安装时还是出现问题了@weijiz
ImportError:No module named hid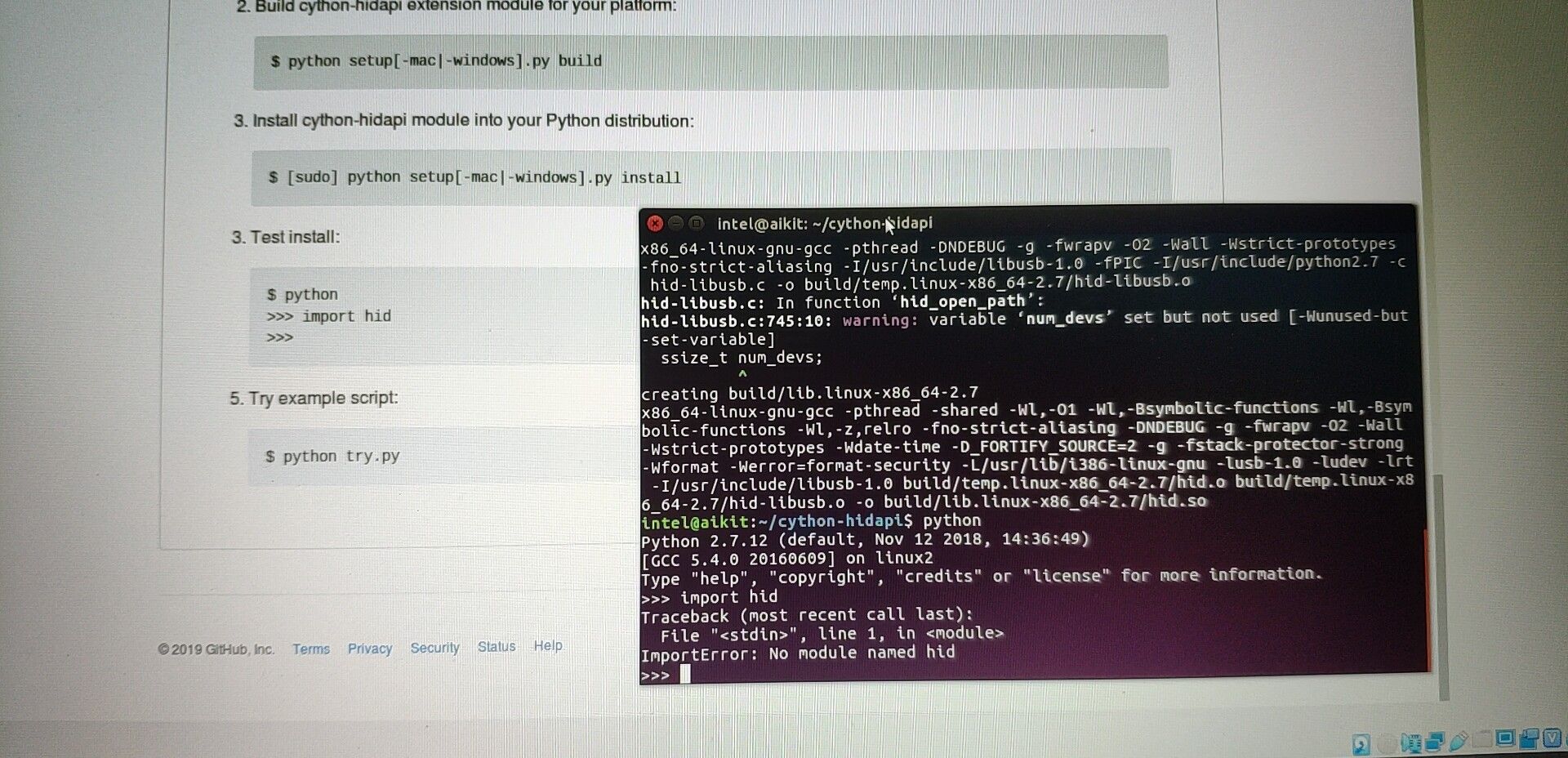
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
安装过程中出现错误,hid-windows.c:23:21:fatal error:windows.h:No such file or directory
error:command ‘x86_64-linux-gnu-gcc’ failed with exit status 1
@weijiz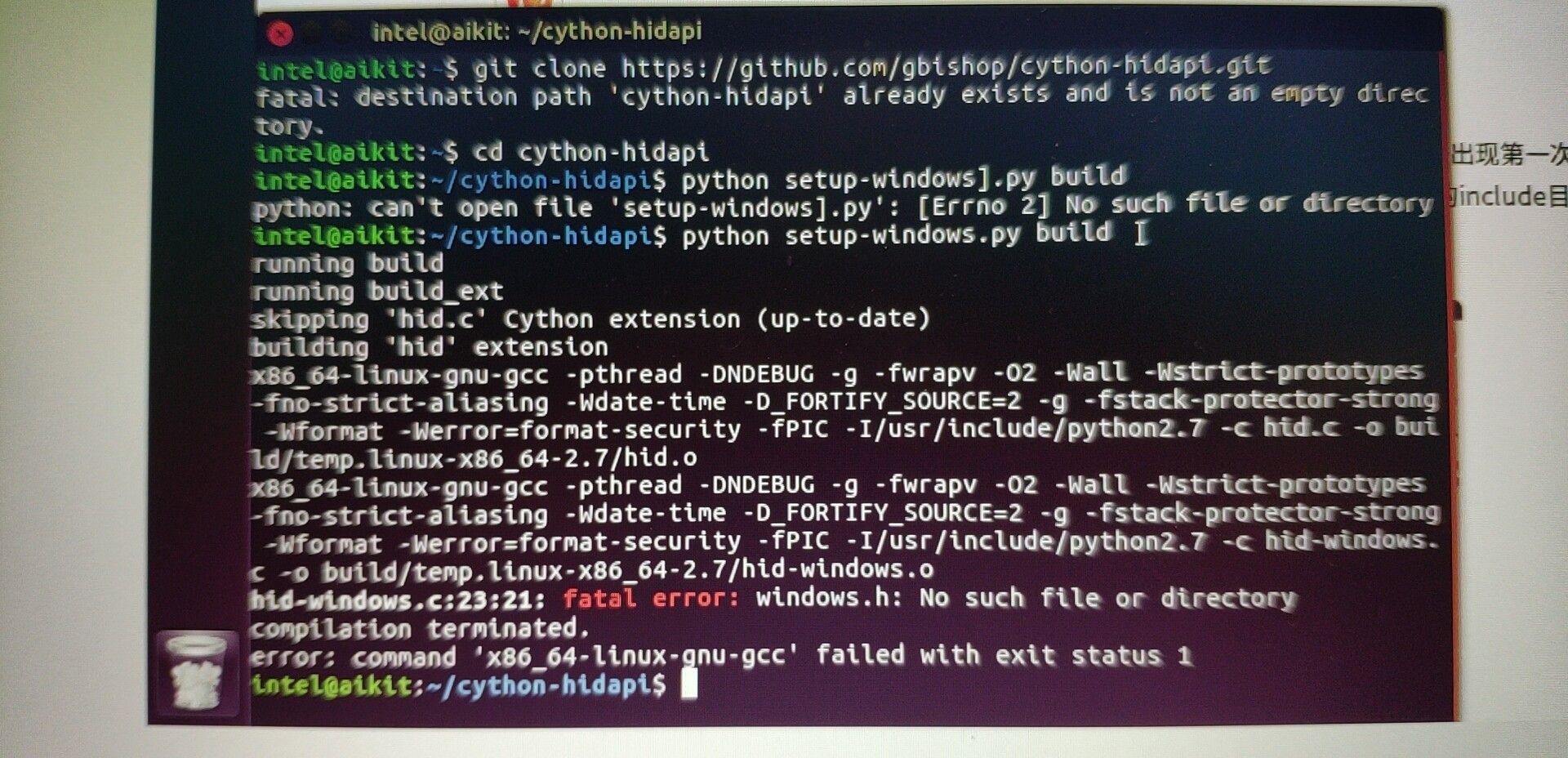
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
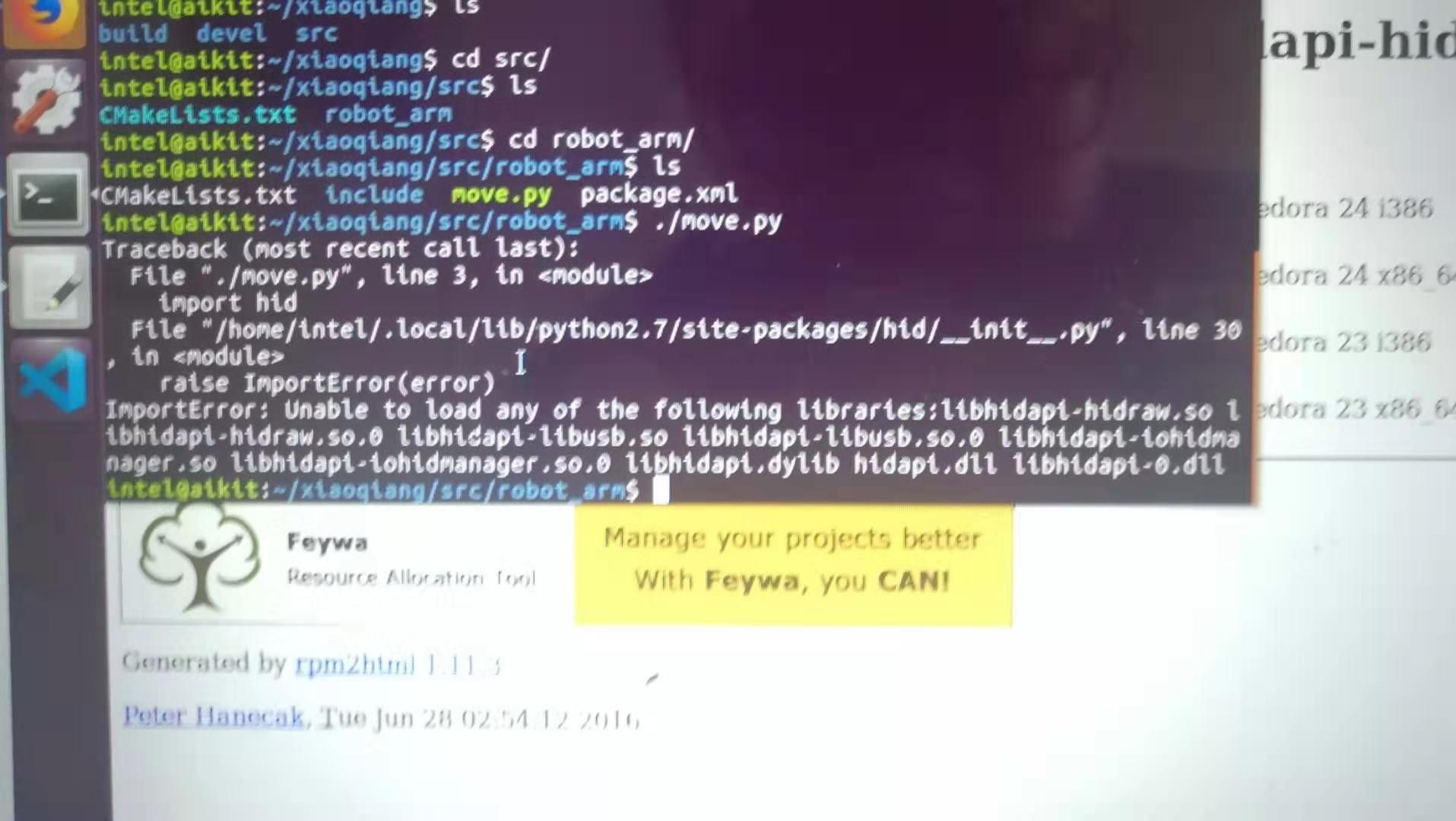
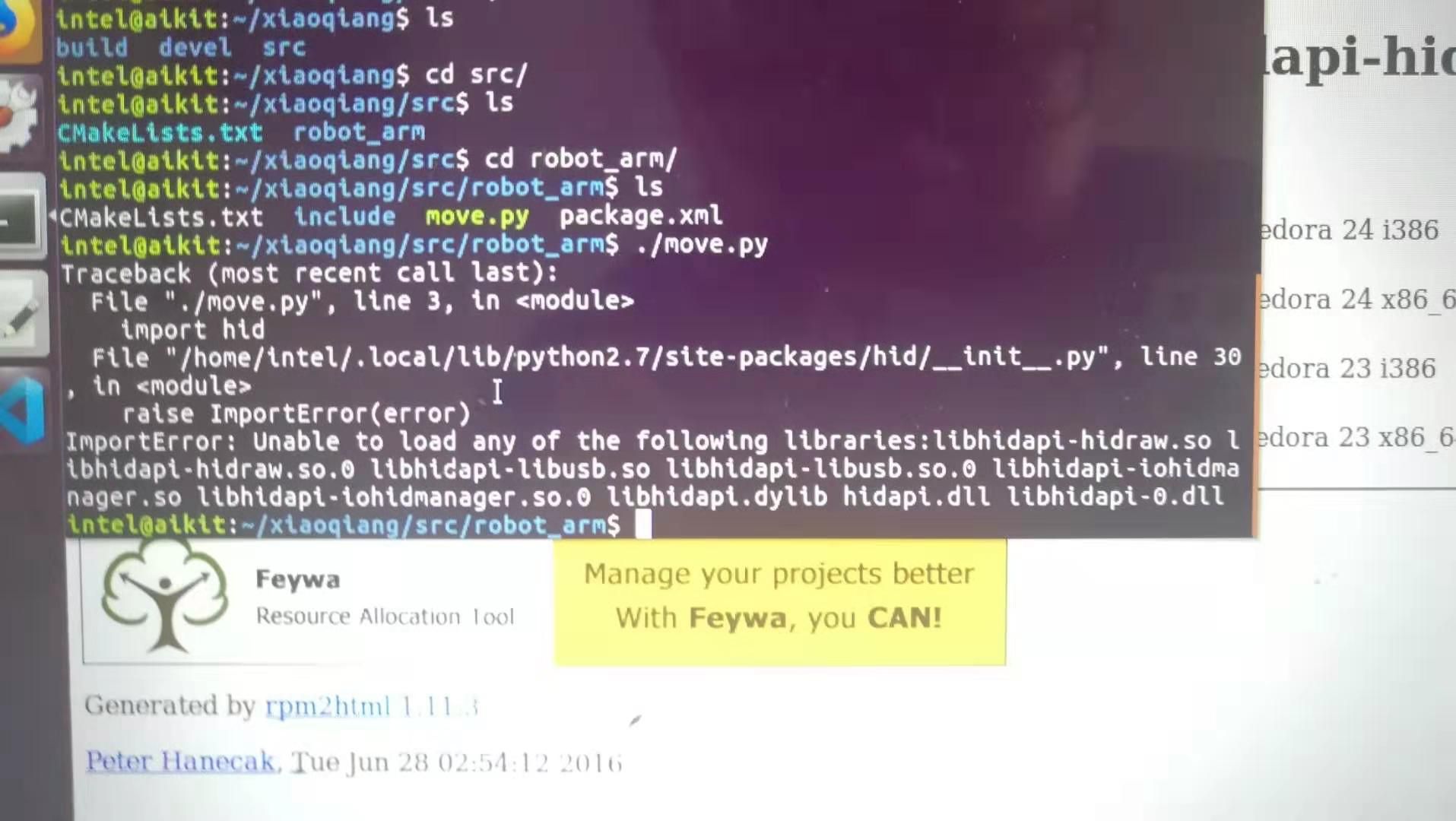
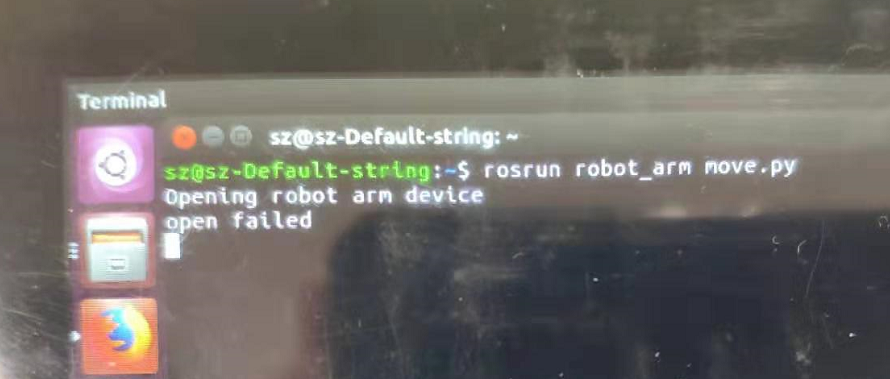
.运行robot_arm节点
rosrun robot_arm move.py 出现错误 @weijiz @xiaoqiang