@robot0612 这个错误可以忽略,继续进行
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
weijiz 发布的帖子
-
RE: hikey 970 debian 镜像(有opencl 和 tensorflow)发布在 技术交流
@SprayHank nvme我没有测试过,可能内核没有开启对应的驱动模块。Tensorflow不需要从源码编译,这个镜像已经有编译好的版本。

-
RE: 使用python代码启动launch文件发布在 技术交流
@几何木偶 因为没有join方法,所以程序出错后退出了。tracking_launch.start()是不阻塞的,需要自己阻塞主线程。比如
import roslaunch import rospy import time uuid = roslaunch.rlutil.get_or_generate_uuid(None, False) roslaunch.configure_logging(uuid) tracking_launch = roslaunch.parent.ROSLaunchParent( uuid, ["/home/xiaoqiang/Documents/ros/src/xiaoqiang_track/launch/track_body.launch"]) tracking_launch.start() while not rospy.is_shutdown(): time.sleep(1)
-
校正kinect tf 关系发布在 产品服务
在教程10使用kinect避障过程中,我们可能会遇到kinect前端显示有障碍物而实际上没有的情况。这可能是由于kinect的tf关系和默认值差别太大的原因。导致kinect没有正确的识别水平面而把地面当作了障碍物。我们可以重新对kinect tf关系进行校准修复这个问题。
首先启动服务
sudo service startup start将Kinect放置于空旷的地方,保证kinect前面2m范围内没有障碍物。然后启动kinect驱动程序
roslaunch freenect_launch freenect-xyz.launch设置kinect角度
rostopic pub /set_tilt_degree std_msgs/Int16 '{data: -19}' -1运行校正程序
rosrun nav_test kinect2base.py等待程序运行完成,会有如下输出
FINAL R: [[ 0. -0.34659864 0.93801353] [-1. 0. 0. ] [ 0. -0.93801353 -0.34659864]]这个R是经过校正的kinect的tf旋转矩阵。把这个值设置到
/home/xiaoqiang/Documents/ros/src/image_pipeline/depth_image_proc/occupancy_xyz.yaml文件中的 transform rotation matrix。这样就可以了。
-
如何在Windows上使用roscpp发布在 技术交流
原理说明
基本想法就是把roscpp库编译成dll或者lib的形式,然后项目通过引用对应的链接库文件使用roscpp的功能。
roscpp的代码本身是支持在Windows平台编译的。但是这个库依赖于其他很多ros库。有些库不支持在Windows平台上编译,有些库在Windows平台上编译非常麻烦。所以我们要对相关文件进行修改,删除不必要的依赖就可以编译了。下面是具体的编译方法。如果你不想自己编译相关的库,想要直接使用,那么可以跳到最后,看创建项目使用roscpp的内容。
安装boost
下载boost库源代码 下载链接
注意版本,版本应该是越新越好。我使用的是1.66版本。解压后以管理员身份开启一个powershell窗口,cd到boost源代码目录。然后执行下面指令
.\bootstrap.bat .\b2.exe variant=release threading=multi threadapi=win32 link=static runtime-link=shared --prefix=C:\boost address-model=64 architecture=x86 install -j8 .\b2.exe variant=debug threading=multi threadapi=win32 link=static runtime-link=shared --prefix=C:\boost address-model=64 architecture=x86 install -j8这样程序会在C:/boost文件夹内安装boost库
安装CMake
下载相关安装包 下载地址
安装完成即可,注意cmake的路径也要添加到系统环境变量里面。
安装catkin_pkg
如果系统没有安装Python2.7需要先安装Python2.7。并且设置好环境变量把python添加到Path里面去
以管理员权限打开一个powershell窗口,然后执行下面的指令
pip install catkin_pkg准备ros工作空间
创建一个文件夹名称随意,这里取为catkin_ws,作为caktin的工作空间。
执行下面指令下载相关源代码cd [到你的工作空间] mkdir src cd src git clone https://github.com/ros/catkin git clone https://github.com/ros/gencpp git clone https://github.com/jsk-ros-pkg/geneus git clone https://github.com/ros/genlisp git clone https://github.com/ros/genmsg git clone https://github.com/RethinkRobotics-opensource/gennodejs git clone https://github.com/ros/genpy git clone https://github.com/ros/message_generation git clone https://github.com/ros/message_runtime git clone https://github.com/BluewhaleRobot/rosconsole git clone https://github.com/BluewhaleRobot/roscpp_core git clone https://github.com/BluewhaleRobot/ros_comm git clone https://github.com/ros/ros_comm_msgs git clone https://github.com/ros/std_msgs编译安装
cd [到你的工作空间] python .\src\catkin\bin\catkin_make # 此时会提示错误,但是没有关系。这个程序会帮我们创建很多相关文件 cd build # 把build文件夹内容删除后执行下面的指令 cmake E:\workspace\catkin_ws\src -DCATKIN_DEVEL_PREFIX=E:\workspace\catkin_ws\devel -DCMAKE_INSTALL_PREFIX=E:\workspace\catkin_ws\install -G "Visual Studio 15 2017 Win64" -DCATKIN_ENABLE_TESTING=OFF -DBoost_USE_STATIC_LIBS=ON -DCMAKE_BUILD_TYPE=Debug -DBUILD_SHARED_LIBS=OFF # 其中的E:\workspace\catkin_ws\src是我的工作空间相关路径,你要换成自己的对应路径。Visual Studio 15 2017 Win64 为Visual Studio的版本信息,根据自己的Visual Studio版本进行设置。这个指令可以没有错误正常执行。正常应该会有下面这样的输出
... -- ==> add_subdirectory(ros_comm/clients/roscpp) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Boost version: 1.66.0 -- Found the following Boost libraries: -- chrono -- filesystem -- signals -- system -- roscpp: 1 messages, 3 services -- Configuring done -- Generating done -- Build files have been written to: E:/workspace/catkin_ws/build然后我们就可以开始编译了。还是在build文件夹内,执行下面的指令。等待编译完成就可以了。
cmake --build . --config Debug --target INSTALL编译完成后,我们可以在工作空间的install 文件夹内找到我们需要的文件。
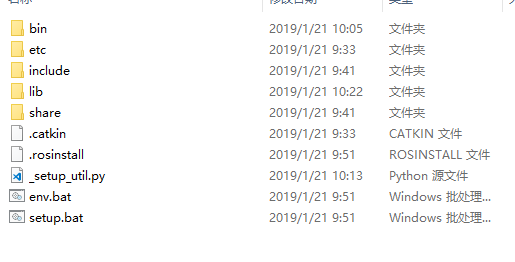
其中我们要用到的是include文件夹内的内容和lib文件夹的内容。上面的编译方式是生成静态链接库,在windows上对应.lib文件。我们把生成的头文件和静态链接库文件添加到自己的项目依赖里面就可以使用roscpp了。
创建项目使用roscpp库
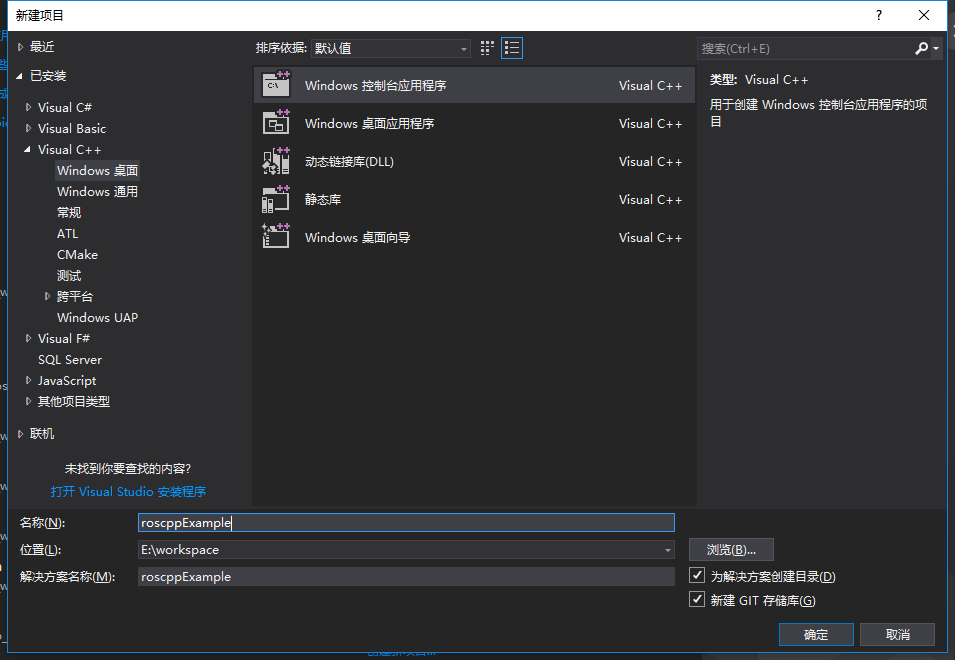
在Visual Studio中创建一个新的Windows控制台程序,命名为roscppExample
进入到项目目录然后创建一个include文件夹和lib文件夹

把boost的头文件内容和caktin工作空间install里面的头文件内容复制进去
复制完成后的include文件夹内容如下所示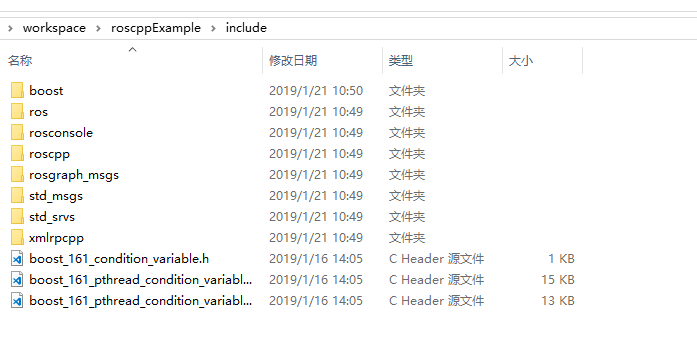
然后从boost/lib文件夹内复制一下的几个文件到刚才创建的lib文件夹
libboost_filesystem-vc141-mt-gd-x64-1_66.lib libboost_filesystem-vc141-mt-x64-1_66.lib libboost_chrono-vc141-mt-gd-x64-1_66.lib libboost_chrono-vc141-mt-x64-1_66.lib libboost_date_time-vc141-mt-gd-x64-1_66.lib libboost_date_time-vc141-mt-x64-1_66.lib libboost_system-vc141-mt-gd-x64-1_66.lib libboost_system-vc141-mt-x64-1_66.lib libboost_thread-vc141-mt-gd-x64-1_66.lib libboost_thread-vc141-mt-x64-1_66.lib libboost_regex-vc141-mt-gd-x64-1_66.lib libboost_regex-vc141-mt-x64-1_66.lib然后把caktin工作空间install/lib文件夹内的几个.lib文件复制到之前创建的lib文件夹中
现在的lib文件夹如下图所示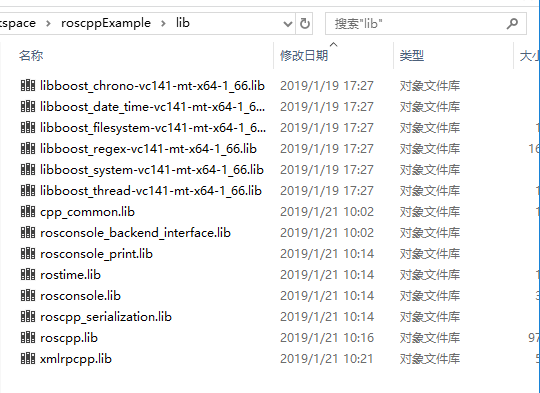
注意上面的库编译的是64位Debug版本。如果需要Release版本对上面cmake的参数进行调整。
设置Visual Studio项目位64 Debug版。打开项目属性,设置VC++目录
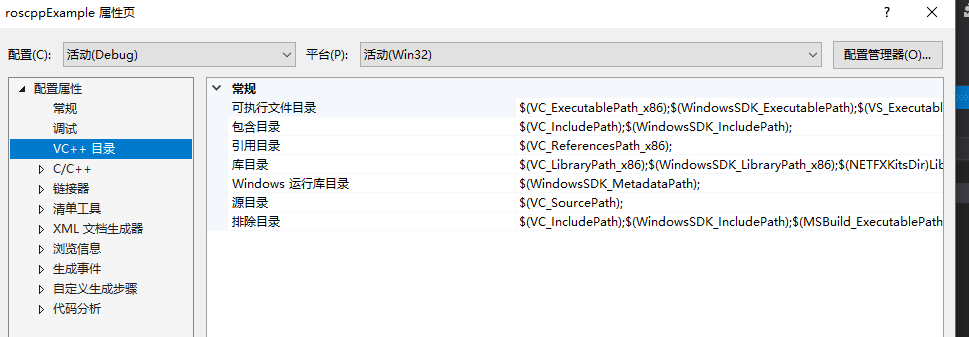
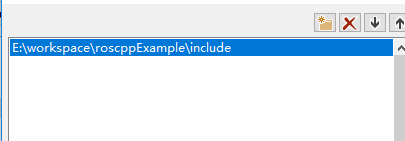
在包含目录里面添加刚才创建的include目录
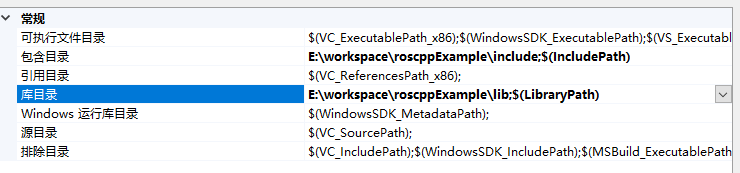
同理在库目录里面添加刚才创建的lib文件夹。现在的项目路径如下图所示
打开链接器输入,附加依赖项。添加上lib中文件的文件名
libboost_filesystem-vc141-mt-x64-1_66.lib libboost_chrono-vc141-mt-x64-1_66.lib libboost_date_time-vc141-mt-x64-1_66.lib libboost_system-vc141-mt-x64-1_66.lib libboost_thread-vc141-mt-x64-1_66.lib libboost_regex-vc141-mt-x64-1_66.lib roscpp.lib roscpp_serialization.lib cpp_common.lib rosconsole.lib rosconsole_backend_interface.lib rosconsole_print.lib rostime.lib xmlrpcpp.lib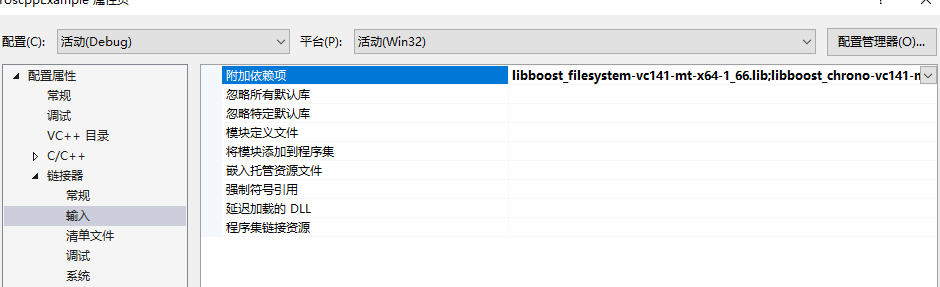
现在就可以在程序中使用roscpp了。下面是一个简单的发消息的cpp程序。
#include "stdafx.h" #define WIN32 #include "ros/ros.h" #include "std_msgs/String.h" #pragma comment(lib, "Ws2_32.lib") int main(int argc, char **argv) { std::map<std::string, std::string> params; params.insert(std::pair<std::string, std::string>("__master", "http://192.168.0.32:11311")); params.insert(std::pair<std::string, std::string>("__ip", "192.168.0.8")); ros::init(params, "talker"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { std_msgs::String msg; std::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); std::cout << "send message: hello world" << std::endl; chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); ++count; } return 0; }编译完成就可以执行了。
按F5看一下运行效果
此时订阅/chatter可以看到输入

这个roscppExample项目已经上传至Github。下载完成后用Visual Studio 2017可以直接打开编译运行,不需要安装其他依赖。如果想要在自己的其他项目里面使用roscpp可以把这个项目include和lib对应的添加到自己项目里。
-
在Windows上cmake无法正确找到boost库模块的问题发布在 技术交流
在我们安装完boost库之后。如果有其他程序通过cmake引用boost库的时候。很有可能出现boost库已经找到,但是对应的模块无法载入。这个问题在于boost的编译版本有很多,比如32位,64位,Debug版或Release版。不同的编译版本生成的链接库文件的名字是不一样的。cmake程序要根据系统的情况和编译配置去猜测文件名。如果猜对了就可以找到,但是也有猜错的情况。这时候就需要进行配置才能找到对应的库文件。
CMake Error at C:/Program Files/CMake 2.8/share/cmake-2.8/Modules/FindBoost.cmake:1106 (message): Unable to find the requested Boost libraries. Boost version: 1.54.0 Boost include path: D:/boost_1_54_0 The following Boost libraries could not be found: boost_thread boost_system boost_log boost_log_setup boost_program_options No Boost libraries were found. You may need to set BOOST_LIBRARYDIR to the directory containing Boost libraries or BOOST_ROOT to the location of Boost. Call Stack (most recent call first): CMakeLists.txt:20 (find_package)在cmake的安装路径里找到下面的文件
CMake\share\cmake-3.13\Modules\FindBoost.cmake这个文件有在开头有很多注释,里面有很多参数。通过配置这些参数可以帮助cmake找到对应的库文件。
下面是比较关键的几个参数set(Boost_DEBUG ON) #是否开启Boost Debug模式,ON位开启,OFF关闭。开启之后会输出很多调试信息,方便寻找错误 set(Boost_ARCHITECTURE "-x32") # CPU架构,对应库文件文件名里的x32或者x64 set(Boost_THREADAPI "win32") # 线程类型,对应thread模块文件名里面的pthread或者win32只要其猜测的文件名和实际文件名能够对应上库的引用就没有问题。你可以把这几个参数设置在自己项目的
CMakeLists.txt文件中
-
在Windows上编译安装boost库发布在 技术交流
boost是一个C++的库,用途很广。
下载源码
从sourceforge上下载源码
编译安装
下载后解压进入源码目录
打开一个命令行程序,cd 到源码目录。注意要以管理员权限执行。
执行
.\bootstrap.bat文件,输出入下图(注意要下载新版本的,老版本的执行会出错)
根据提示执行
b2.exe程序。根据我们不同的需求可以给b2.exe增加很多参数。下面是常用的几个参数安装参数
toolset 编译器类别,可以是gcc,或者是msvc target-os 目标操作系统,可以是Windows,Linux variant 生成类型,可以是 debug或者release threadapi 线程API的实现,可以是win32或者pthread,在windows上编译就用win32 link 链接库类型,可以是静态的,也可以是shared,对应windows上的库就是.lib或者是dll prefix 安装路径 user-config 用户自定义配置文件,在cross compile的时候可以用来配置编译工具链 address-model 生成32位还是64位库文件 architecture=x86 cpu架构,一般台式机位x86,嵌入式平台位arm比如我们想要在windows上编译安装64位的Release版的静态链接库到
C:\boost路径下就可以执行下面的指令.\b2.exe variant=release threading=multi threadapi=win32 link=static runtime-link=shared --prefix=C:\boost address-model=64 architecture=x86 install -j8最后我们加了
-j8参数。这个代表8线程同时编译,可以提高编译安装的速度。如果我们想要安装Mingw-w64版本的boost就可以用下面的指令
.\b2.exe toolset=gcc variant=release threading=multi threadapi=win32 link=static runtime-link=shared --prefix=C:\boost address-model=64 architecture=x86 install -j8当然前提是已经安装了mingw-w64程序。
编译完成后可以在C:\boost文件夹内看到include和lib文件夹。这里就是编译好的boost文件。
-
RE: The /scan observation buffer has not been updated的问题发布在 技术交流
@kkk123 在 The /scan observation buffer has not been updated的问题 中说:
cc_fake_move_base_blank_map
你可以订阅一下/scan看看实际的频率是多少。消息有没有被message filter过滤。
-
RE: 罕见bug解决办法: kienct 1代运行错误Failed to claim camera interface: LIBUSB_ERROR_NOT_FOUND发布在 技术交流
@王雷 kinect没有识别。从错误信息看可能是硬件问题。你可以先在自己的电脑上试试能不能正常使用。
-
RE: 罕见bug解决办法: kienct 1代运行错误Failed to claim camera interface: LIBUSB_ERROR_NOT_FOUND发布在 技术交流
@王雷 可以在开机后运行
dmesg --follow再插入看看有什么提示信息。
插入后运行lsusb看看设备列表里面是不是有kinect。
-
RE: 解决systemback 无法生成超过4G的iso的问题发布在 技术交流
@ldh 这是另外一个问题,你的文件有超过4G的。这个是没办法的。总的iso大小可以超过4G但是里面的单个文件不能超过4G。