@weijiz 目前调整后运行xiaoqiang_local.launch已经可以自动调整并且接触到充电桩了,但是每次都是触碰上就离开,然后重复。通过检测电压电流并结合https://community.bwbot.org/topic/16518/%E4%BA%8C%E7%BB%B4%E7%A0%81bw_auto_dock%E8%87%AA%E5%8A%A8%E5%85%85%E7%94%B5%E5%8A%9F%E8%83%BD%E5%8C%85%E7%9A%84%E4%BD%BF%E7%94%A8?lang=en-US发现:
- 在检测工具上电压正常,电流始终为-0.05A,如图
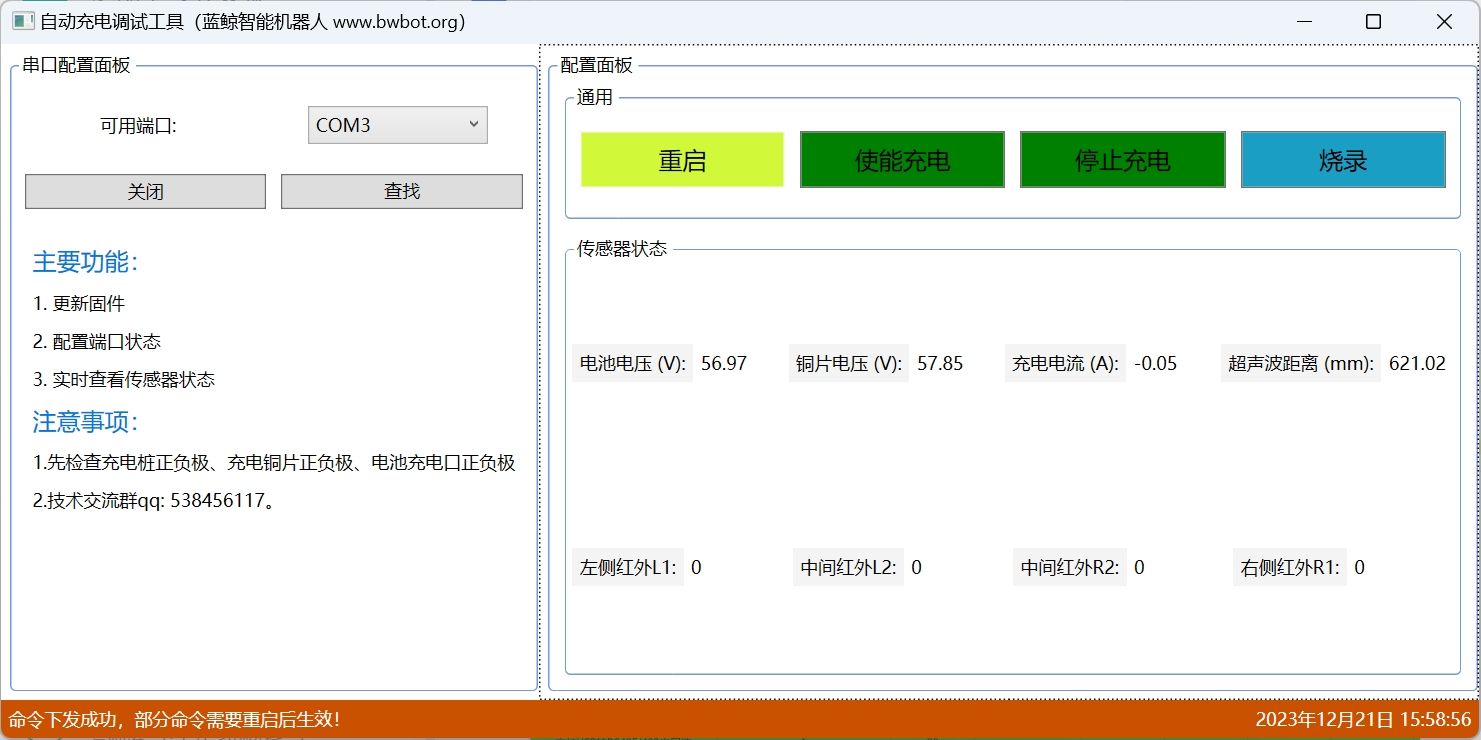
- 用万用表测量电流为2.4A左右
这样是否表明板子坏掉了?

 下载的ar_track_alvar也是noetic的
下载的ar_track_alvar也是noetic的