ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
伽利略客户端导航使用问题
-
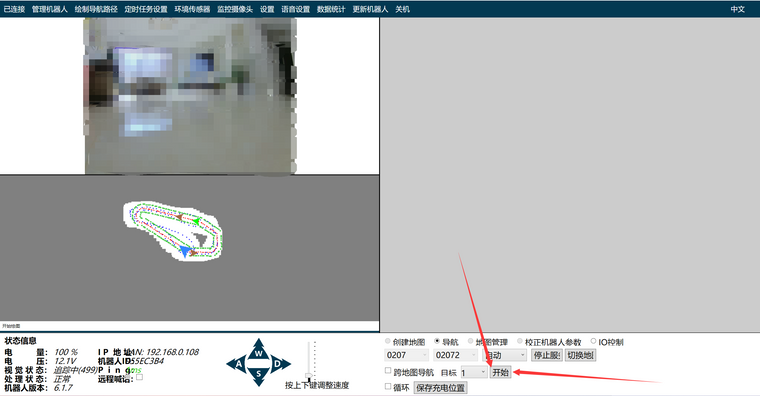
建图,摄像头,遥控都没有问题,但是绘制好路径开启导航后,无法向目标点移动,点击图中箭头所指的 “开始” 按键没有任何反应,但是地图精度通过遥控来看还是非常准确的,请问该如何驶向导航点呢?
-
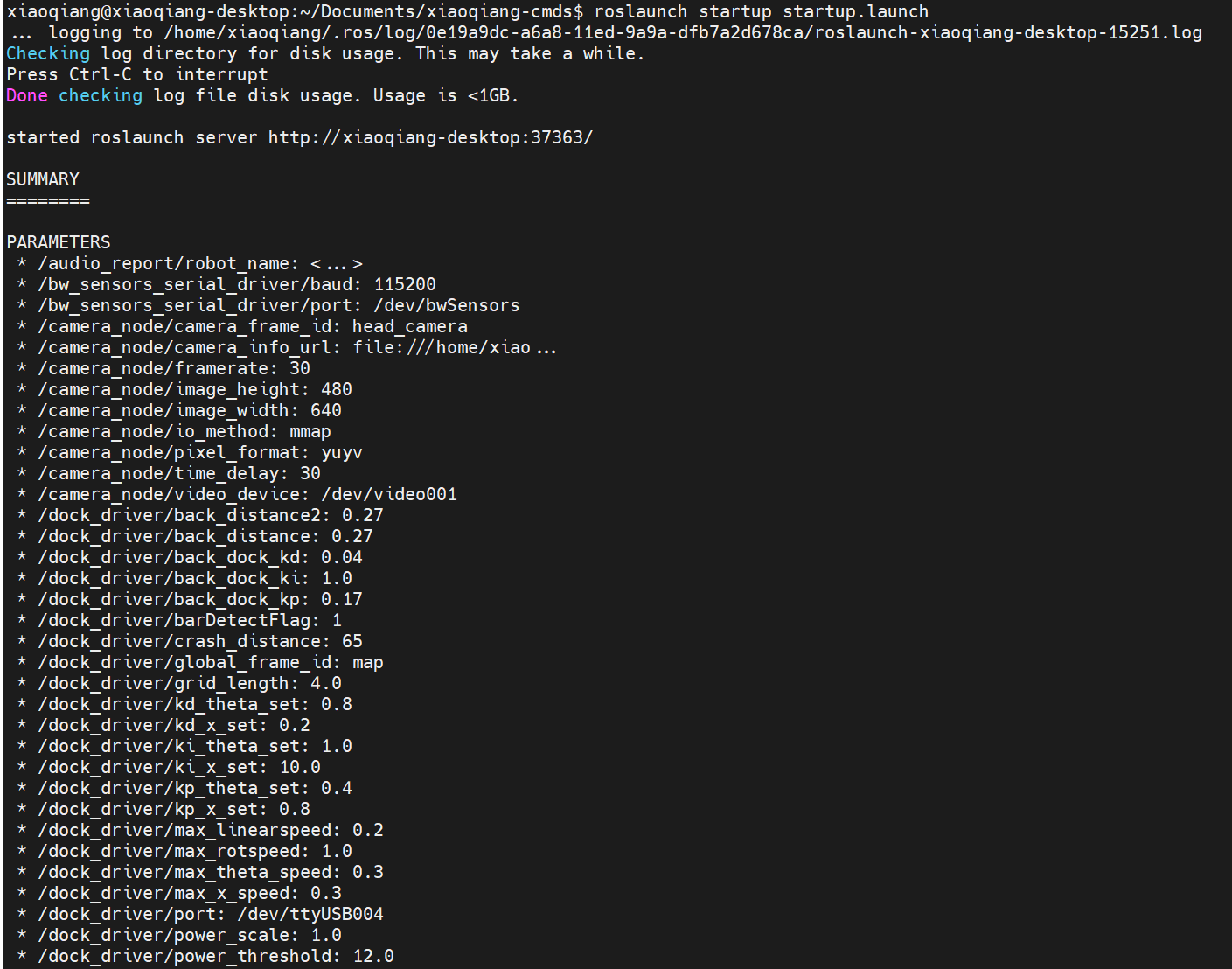
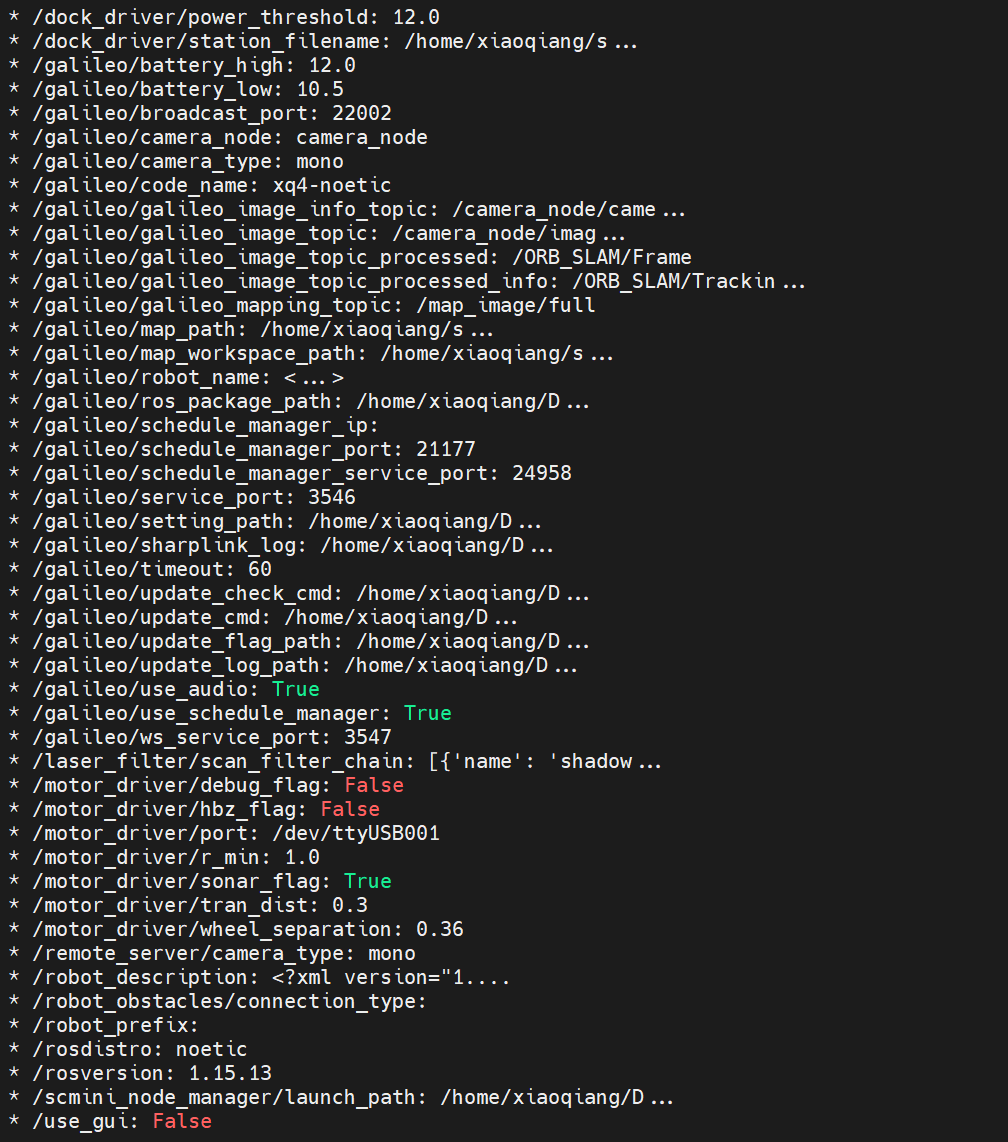
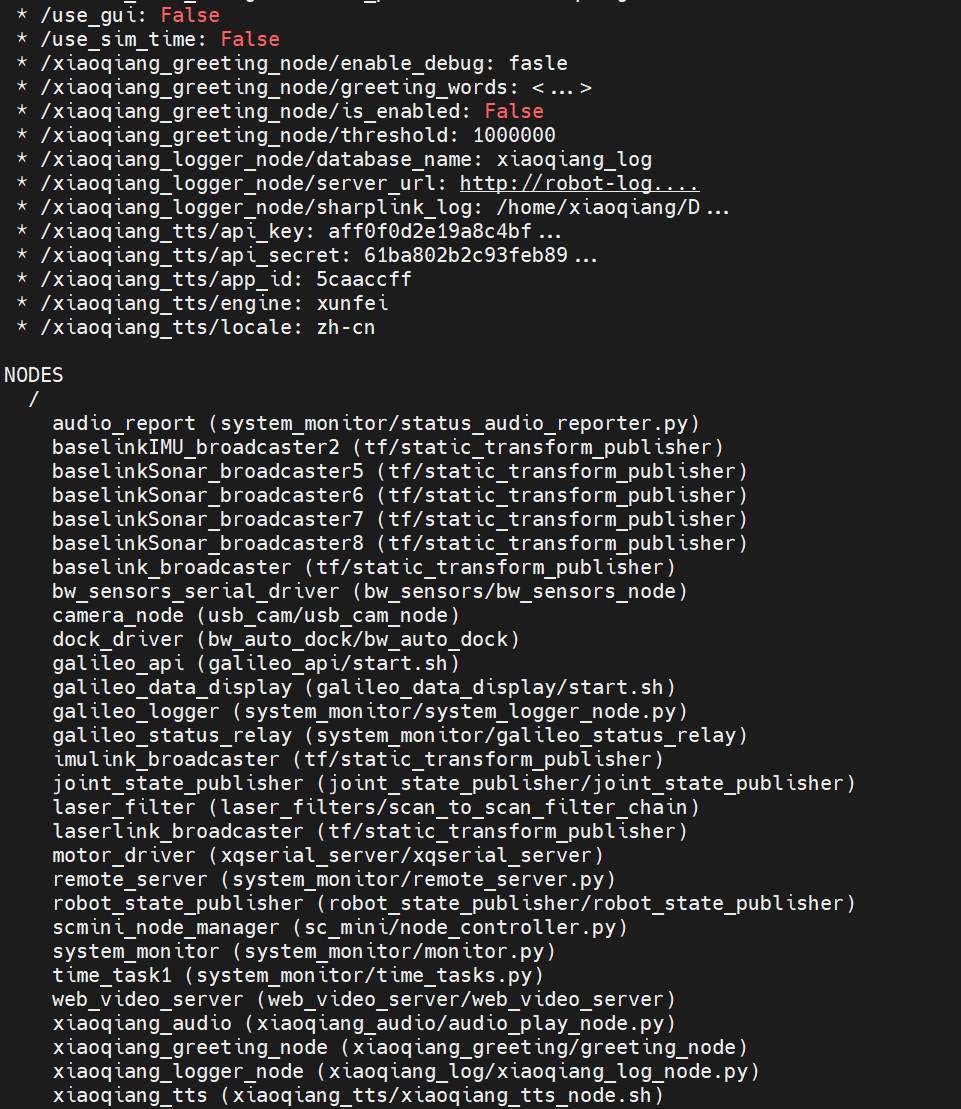
@mrtk 1.机器是什么型号,点击目标点开始按钮后,按钮会变成暂停吗,2.检查红色路线是否有断点(路线可以交叉,但不可以断开)。3.在绘制导航路径界面检查当前路径的循环方向(要设成双向)。4.如果还是不行,手动启动startup,开启导航后,客户端发送导航目标点,截图launch文件运行窗口的输出信息。
#先停止 sudo service startup stop #再启动 roslaunch startup startup.launch -
@xiaoqiang 在 伽利略客户端导航使用问题 中说:
1.机器是什么型号,点击目标点开始按钮后,按钮会变成暂停吗,2.检查红色路线是否有断点(路线可以交叉,但不可以断开)。3.在绘制导航路径界面检查当前路径的循环方向(要设成双向)。4.如果还是不行,手动启动startup,开启导航后,客户端发送导航目标点,截图launch文件运行窗口的输出信息。
1.机器是xq4-pro,点击目标点开始按钮后,按钮不会变成暂停
2.红色路线没有断点,我试了下只有一条直线也是无法运行。
3.导航点已全部设成双向。
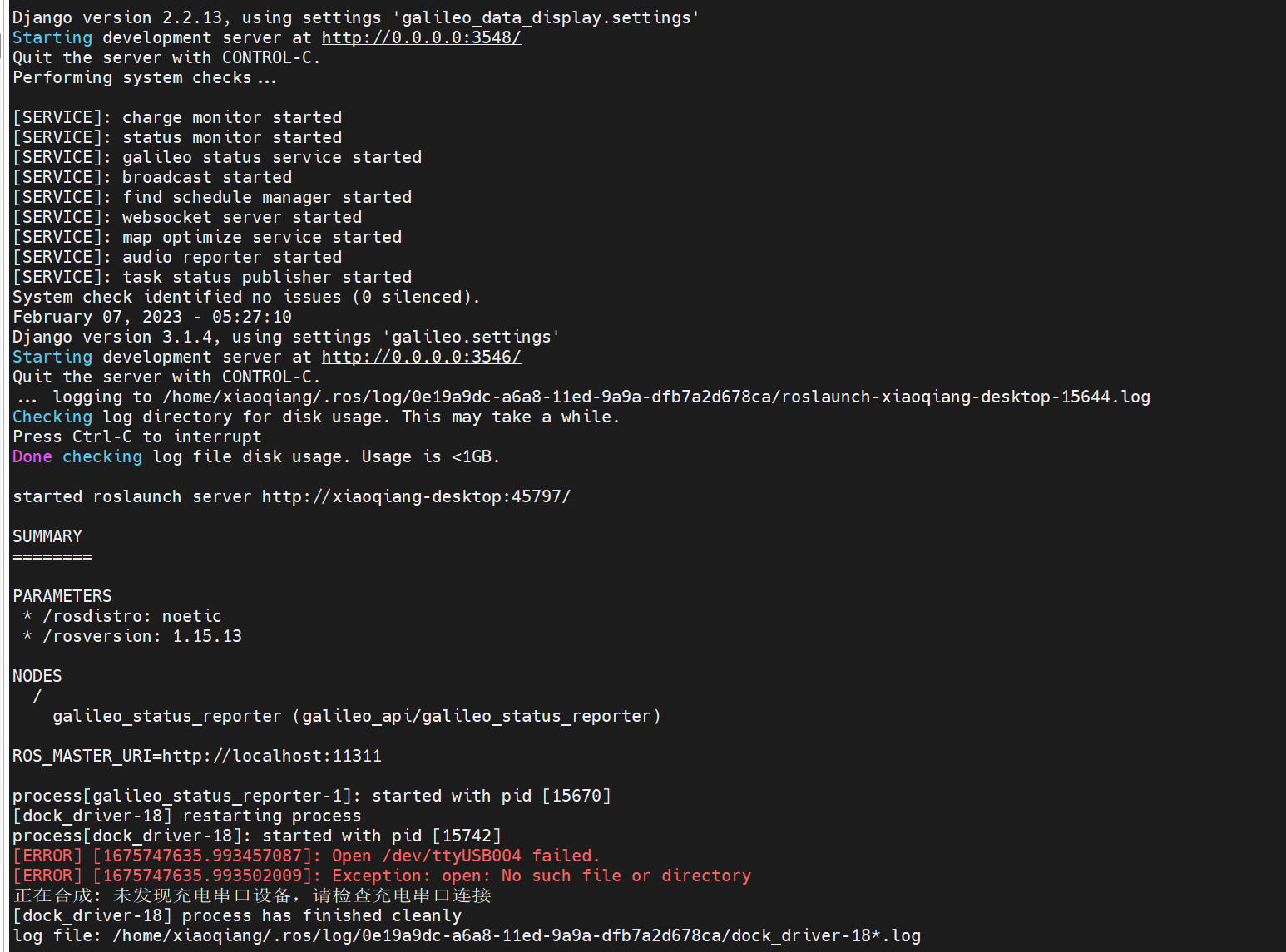
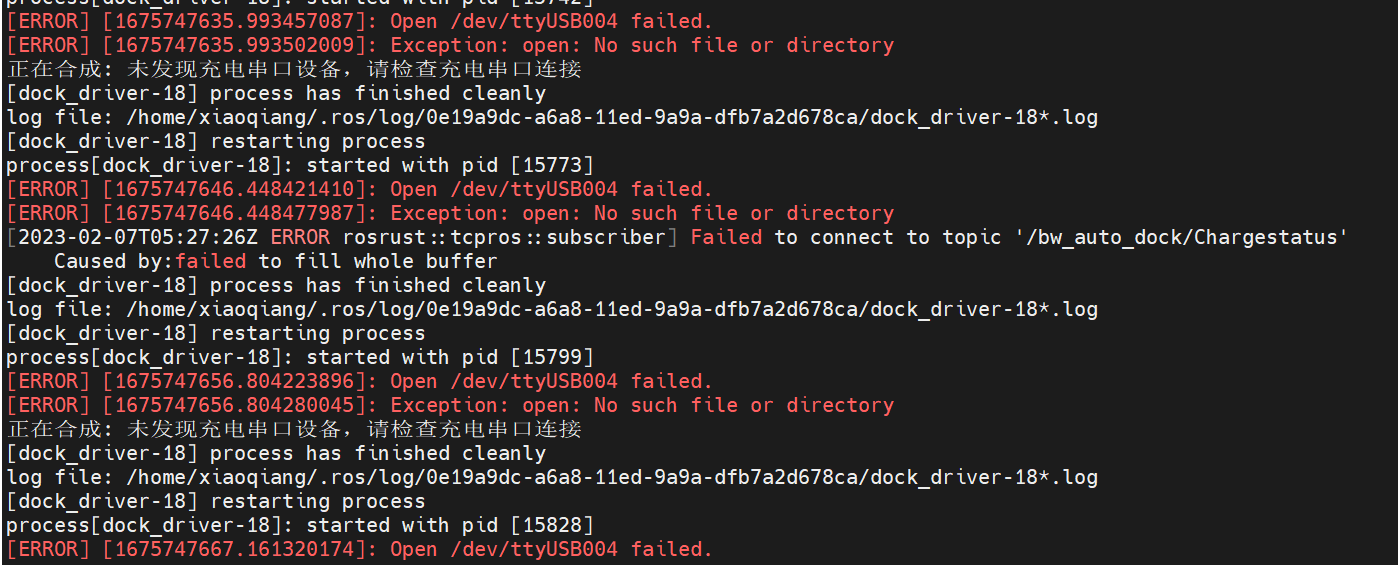
4.输出信息:这些信息是连续的,往后都是循环的一个充电串口的报错
-
@mrtk 贴开始导航后,点击目标点“开始”按钮时的截图
-
@xiaoqiang 好使了,有可能之前系统分区有问题,重装一次后全都好使了