ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
自动充电测试xiaoqiang_local.launch失败
-
按照文档中“获取这个值,先把车手动对接上充电桩,启动xiaoqiang_local.launch,听到开始充电后。。。”操作。
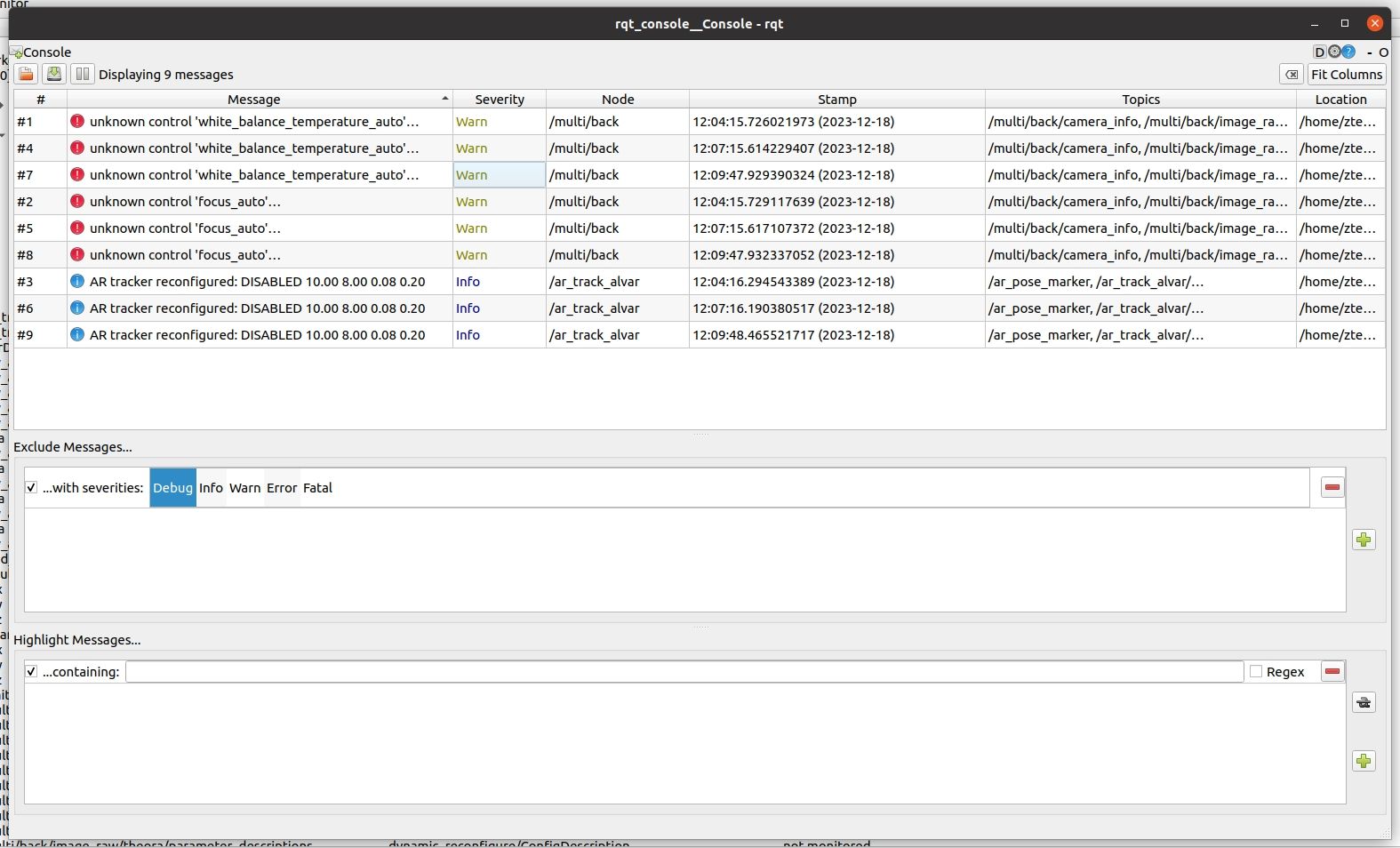
然后程序报如图中所示错误,然后发现ar_track_alvar.launch时报的错误,这个是什么问题,如何解决呢?谢谢!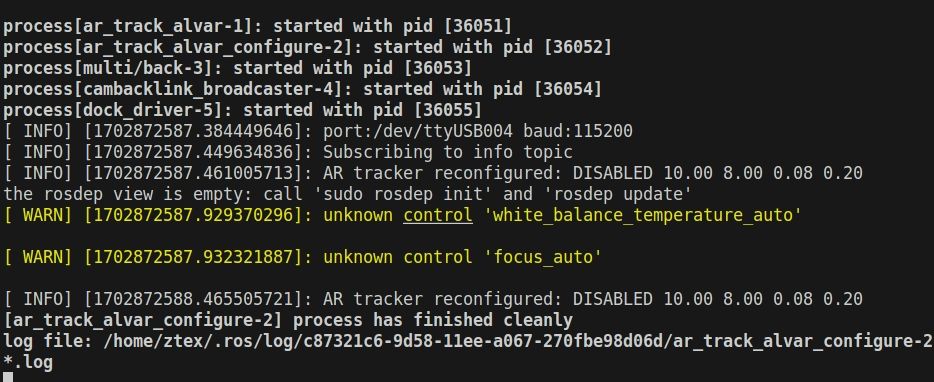
-
根据你的描述,这个错误可能是由于AR标记点没有被正确地识别导致的。AR跟踪(AR track alvar)是用来追踪特殊标记物的一种方法,这种标记物通常是一个带有唯一标识符的二维码或条形码。
这个问题可能有几个原因:
- 标记物未被正确放置:请确保AR标记物已经按照说明书中的要求放置在充电桩上,并且小车上的相机可以清晰地看到它。
- 相机配置问题:确认相机参数已经被正确设置并加载。你可以尝试重新运行一次
roslaunch xiaoqiang_calibration camera_calibration.launch来重新进行相机标定和参数设置。 - 软件版本不兼容:检查你正在使用的ROS版本以及AR跟踪包的版本是否匹配。有时候升级或者降级某些软件包可以解决问题。
如果以上步骤无法解决你的问题,请提供更多关于错误日志的信息,以便我们能更准确地定位和解决问题。
我是论坛智能小助理,回答的问题可能是错误的。对于一些可能影响设备的关键问题,请谨慎参考我的回答
-
- 标记物放置如图!

- 提供的代码包中并无xiaoqiang_calibration的package
- ROS版本如图
 下载的ar_track_alvar也是noetic的
下载的ar_track_alvar也是noetic的
如何继续检查是什么问题?
- 标记物放置如图!
-
根据你的描述,可能是由于以下原因导致的问题:
- 标记物未被正确放置:请确保AR标记物已经按照说明书中的要求放置在充电桩上,并且小车上的相机可以清晰地看到它。
- 相机配置问题:确认相机参数已经被正确设置并加载。你可以尝试重新运行一次roslaunch xiaoqiang_calibration camera_calibration.launch来重新进行相机标定和参数设置。
- 软件版本不兼容:检查你正在使用的ROS版本以及AR跟踪包的版本是否匹配。有时候升级或者降级某些软件包可以解决问题。
如果以上步骤无法解决你的问题,请提供更多关于错误日志的信息,以便我们能更准确地定位和解决问题。
-
@yao 黄色的不是错误,只是警告,可以忽略。
-
@yao 在 自动充电测试xiaoqiang_local.launch失败 中说:
- 标记物放置如图!
- 提供的代码包中并无xiaoqiang_calibration的package
- ROS版本如图 下载的ar_track_alvar也是noetic的
如何继续检查是什么问题?
同时,执行rostopic pub /bw_auto_dock/dockposition_save std_msgs/Bool ‘{data: true}’ -1后并没有在luanch中修改的绝对路径中找到dock_station.txt文件
- 标记物放置如图!
-
@yao 一般没法保存90%的可能性都是tf设置的有问题。看看你的tf树有没有断开
-
@weijiz 是的,但是执行ar_track_alvar.launch程序会自动死掉,就如同黄色下面的process died
-
@yao 那个是reconfigure节点自动退出,这个节点是设置参数的,设置完就自动退出。这是正常现象。launch也不是卡住,launch正常运行时就是这样的输出。
-
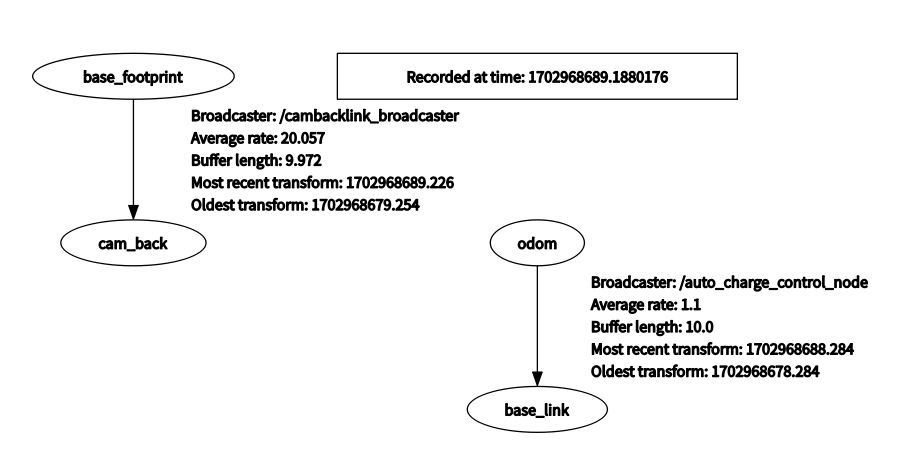
@weijiz 好的,在执行xiaoqiang_local.launch后我用tf-tree看了一下,如图:
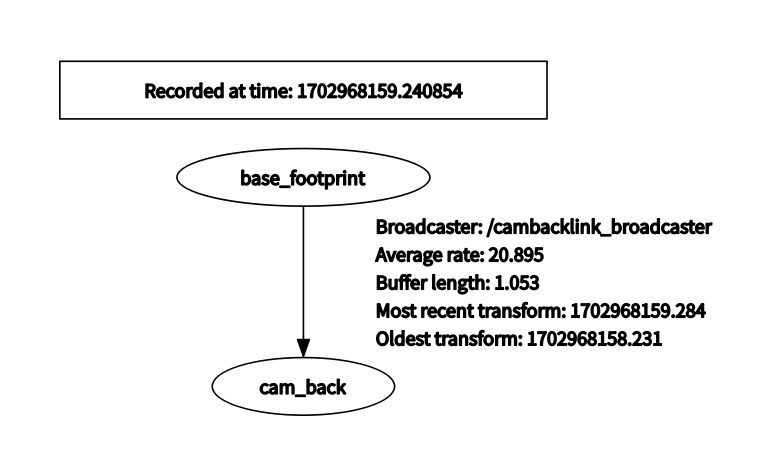
这应该是不正常的对吧 -
@yao 不正常,缺里程计
-
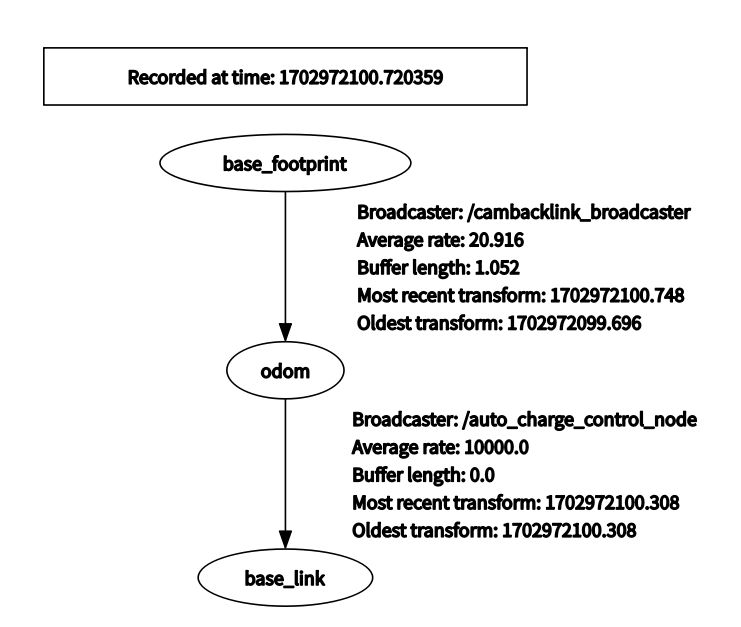
@weijiz 好的,现在呢?
-
@yao 里程计有了,但通过rostopic pub /bw_auto_dock/dockposition_save std_msgs/Bool ‘{data: true}’ -1目前是无法保存充电桩的位置
-
@yao tf树不能断开,先学习一下tf的基础知识
-
@weijiz tf-tree这样对吗?
-
-
@yao 你的摄像头tf又没了。没有摄像头tf机器人不能知道二维码相对于机器人的位置。搜索一下论坛很多人都有你这个问题。参考一下别人的设置
-
@weijiz 好的
-
@weijiz 目前调整后运行xiaoqiang_local.launch已经可以自动调整并且接触到充电桩了,但是每次都是触碰上就离开,然后重复。通过检测电压电流并结合https://community.bwbot.org/topic/16518/%E4%BA%8C%E7%BB%B4%E7%A0%81bw_auto_dock%E8%87%AA%E5%8A%A8%E5%85%85%E7%94%B5%E5%8A%9F%E8%83%BD%E5%8C%85%E7%9A%84%E4%BD%BF%E7%94%A8?lang=en-US发现:
- 在检测工具上电压正常,电流始终为-0.05A,如图
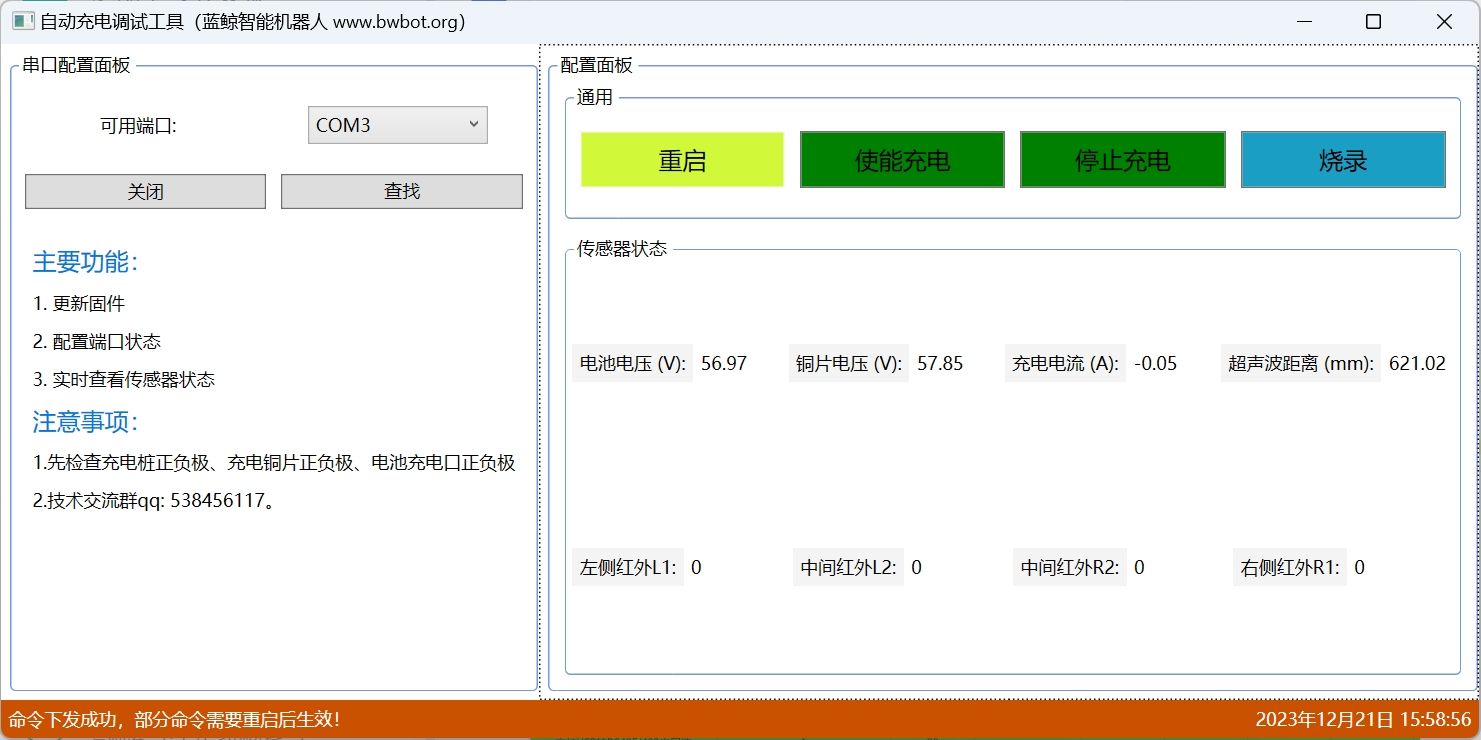
- 用万用表测量电流为2.4A左右
这样是否表明板子坏掉了?
- 在检测工具上电压正常,电流始终为-0.05A,如图
-
@yao 用检测工具时是否点击使能充电。还有一个可能是充电器如果是脉冲式充电,电流也可能会很小。可以在参数里面设置current_bias把电流偏置提高试试