ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
rk3588在ros中使用ros_rknn_yolo包
-
本文档将引导您如何在基于RK3588的设备上,使用ros_rknn_yolo软件包进行高效的对象检测。
1. 下载与编译
环境准备
确保您的RK3588设备已经安装了ROS环境。本教程默认您使用的是ROS1版本,具体的安装步骤请参考
ros_rknn_yolo包内的readme文件。克隆软件包
首先,切换到您的ROS工作空间
src目录下,然后克隆ros_rknn_yolo软件包及其依赖的vision_msgs软件包:cd ~/rk3588_ros_ws/src git clone https://git.bwbot.org/publish/ros_rknn_yolo.git git clone https://git.bwbot.org/publish/vision_msgs.git编译软件包
返回到工作空间的根目录,进行编译:
#先安装系统依赖 sudo apt install python3-virtualenv pip install opencv-python opencv-contrib-python #开始编译 cd ~/rk3588_ros_ws/ catkin_make编译完成后,需要运行
ros_rknn_yolo包中的一个脚本以设置rknn2的运行环境:roscd ros_rknn_yolo sudo ./fix_rknn2_runtime2. 启动Launch文件
ros_rknn_yolo包提供了Launch文件来启动节点和相关的配置。
在终端中运行以下命令以启动:roslaunch ros_rknn_yolo xiaoqiang_yolo.launch
以上命令将启动rknn_yolo_node节点,并加载预定义的配置。有关节点参数和功能的详细信息,请参阅readme_cn.md文件。3. 启动测试文件
为了验证
ros_rknn_yolo包是否正常工作,可以运行包内提供的测试文件。
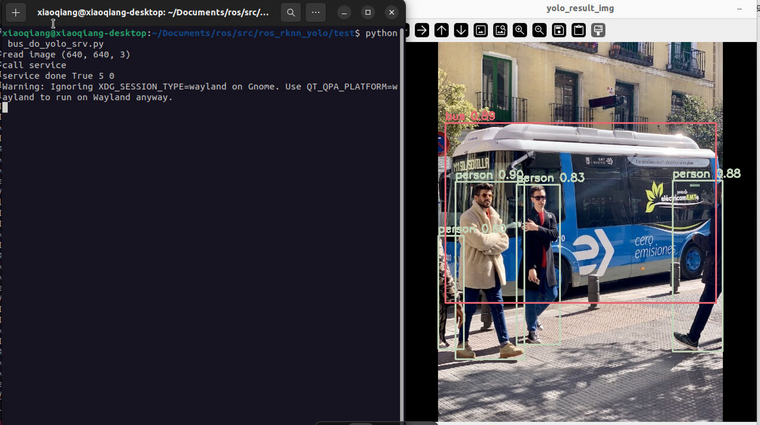
在新的终端窗口中,执行以下命令来启动测试节点:roscd ros_rknn_yolo/test python bus_do_yolo_srv.py此测试脚本将向
rknn_yolo_node节点发送一张图片,并显示检测结果。
您还可以自己运行其它test文件,比如同时推理两个视频
结语
至此,您已成功在RK3588设备上使用
ros_rknn_yolo包进行了对象检测。根据您的具体需求,请进一步探索和调整ros_rknn_yolo包的配置和功能。常见问题
a.这个包有两个分支,一个是master分支,还有一个是no-opencl分支,不想使用opencl加速的同学可以使用no-opencl分支。如果安装master分支时,提示无法安装python 依赖包,可能是opencl相关库没有安装好,可以先执行sudo ./fix_rknn2_runtime 。
b.这个包默认系统配置的python版本是3.10,其它版本的同学要将rknn_toolkit_lite2的安装包换成自己系统python版本的包,同时修改CMakeLists.txt中的88行。
-
这个文档提供了一个详细的步骤,指导如何在基于RK3588的系统上使用ROS和
ros_rknn_yolo包来实现YOLO对象检测。以下是每个步骤的总结:-
环境准备:
- 确保您的设备上已经安装了ROS1环境。
- 在ROS工作空间的
src目录下克隆ros_rknn_yolo和vision_msgs包。
-
编译与环境设置:
- 回到工作空间根目录并使用
catkin_make编译。 - 编译完成后,运行
fix_rknn2_runtime脚本来设置运行环境。
- 回到工作空间根目录并使用
-
启动对象检测:
- 使用
roslaunch命令启动xiaoqiang_yolo.launch,它会启动rknn_yolo_node节点。
- 使用
-
验证功能:
- 在另一个终端中,进入
test子目录并运行bus_do_yolo_srv.py,这个测试脚本将发送图像数据给rknn_yolo_node并展示检测结果。
- 在另一个终端中,进入
-
进一步探索:
- 可以根据需要调整
ros_rknn_yolo包的配置和其他测试脚本。
- 可以根据需要调整
请注意,这个过程假设您已经配置了必要的依赖,比如RKNPU2驱动、RKNN工具包和相应的模型。如果有任何问题,建议查阅
readme_cn.md文件或联系软件包的开发者获取帮助。 -
-
您好,我在运行到catkin_make时显示安装python依赖失败,查看CMakeError.log文件,显示如下图。通过测试,3588上有phtread。请问这是什么问题,该怎么解决?谢谢!
Performing C SOURCE FILE Test CMAKE_HAVE_LIBC_PTHREAD failed with the following output: Change Dir: /home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp Run Build Command(s):/usr/bin/make cmTC_48f6f/fast && /usr/bin/make -f CMakeFiles/cmTC_48f6f.dir/build.make CMakeFiles/cmTC_48f6f.dir/build make[1]: 进入目录“/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp” Building C object CMakeFiles/cmTC_48f6f.dir/src.c.o /usr/bin/cc -DCMAKE_HAVE_LIBC_PTHREAD -o CMakeFiles/cmTC_48f6f.dir/src.c.o -c /home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp/src.c Linking C executable cmTC_48f6f /usr/bin/cmake -E cmake_link_script CMakeFiles/cmTC_48f6f.dir/link.txt --verbose=1 /usr/bin/cc -DCMAKE_HAVE_LIBC_PTHREAD -rdynamic CMakeFiles/cmTC_48f6f.dir/src.c.o -o cmTC_48f6f /usr/bin/ld: CMakeFiles/cmTC_48f6f.dir/src.c.o: in function `main': src.c:(.text+0x48): undefined reference to `pthread_create' /usr/bin/ld: src.c:(.text+0x50): undefined reference to `pthread_detach' /usr/bin/ld: src.c:(.text+0x5c): undefined reference to `pthread_join' collect2: error: ld returned 1 exit status make[1]: *** [CMakeFiles/cmTC_48f6f.dir/build.make:87:cmTC_48f6f] 错误 1 make[1]: 离开目录“/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp” make: *** [Makefile:121:cmTC_48f6f/fast] 错误 2 Source file was: #include <pthread.h> void* test_func(void* data) { return data; } int main(void) { pthread_t thread; pthread_create(&thread, NULL, test_func, NULL); pthread_detach(thread); pthread_join(thread, NULL); pthread_atfork(NULL, NULL, NULL); pthread_exit(NULL); return 0; } Determining if the function pthread_create exists in the pthreads failed with the following output: Change Dir: /home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp Run Build Command(s):/usr/bin/make cmTC_4bba2/fast && /usr/bin/make -f CMakeFiles/cmTC_4bba2.dir/build.make CMakeFiles/cmTC_4bba2.dir/build make[1]: 进入目录“/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp” Building C object CMakeFiles/cmTC_4bba2.dir/CheckFunctionExists.c.o /usr/bin/cc -DCHECK_FUNCTION_EXISTS=pthread_create -o CMakeFiles/cmTC_4bba2.dir/CheckFunctionExists.c.o -c /usr/share/cmake-3.16/Modules/CheckFunctionExists.c Linking C executable cmTC_4bba2 /usr/bin/cmake -E cmake_link_script CMakeFiles/cmTC_4bba2.dir/link.txt --verbose=1 /usr/bin/cc -DCHECK_FUNCTION_EXISTS=pthread_create -rdynamic CMakeFiles/cmTC_4bba2.dir/CheckFunctionExists.c.o -o cmTC_4bba2 -lpthreads /usr/bin/ld: 找不到 -lpthreads collect2: error: ld returned 1 exit status make[1]: *** [CMakeFiles/cmTC_4bba2.dir/build.make:87:cmTC_4bba2] 错误 1 make[1]: 离开目录“/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeTmp” make: *** [Makefile:121:cmTC_4bba2/fast] 错误 2 -
@shlfan 在 rk3588在ros中使用ros_rknn_yolo包 中说:
undefined reference to `pthread_join’
catkin_make时默认会编译整个工作空间中的包,你目前的错误是其它ros包有问题,可以使用下面命令只编译ros_rknn_yolo包
catkin_make -DCATKIN_WHITELIST_PACKAGES="vison_msgs;ros_rknn_yolo" -
@shlfan 在工作空间中只有这两个包,没有其他的包了,使用您给的代码最后得到的结果没有变化
ema@ema:~/rk3588_ros_ws$ catkin_make -DCATKIN_WHITELIST_PACKAGES="vison_msgs;ros_rknn_yolo" Base path: /home/ema/rk3588_ros_ws Source space: /home/ema/rk3588_ros_ws/src Build space: /home/ema/rk3588_ros_ws/build Devel space: /home/ema/rk3588_ros_ws/devel Install space: /home/ema/rk3588_ros_ws/install #### #### Running command: "cmake /home/ema/rk3588_ros_ws/src -DCATKIN_WHITELIST_PACKAGES=vison_msgs;ros_rknn_yolo -DCATKIN_DEVEL_PREFIX=/home/ema/rk3588_ros_ws/devel -DCMAKE_INSTALL_PREFIX=/home/ema/rk3588_ros_ws/install -G Unix Makefiles" in "/home/ema/rk3588_ros_ws/build" #### -- The C compiler identification is GNU 9.4.0 -- The CXX compiler identification is GNU 9.4.0 -- Check for working C compiler: /usr/bin/cc -- Check for working C compiler: /usr/bin/cc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Detecting C compile features -- Detecting C compile features - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Detecting CXX compile features -- Detecting CXX compile features - done -- Using CATKIN_DEVEL_PREFIX: /home/ema/rk3588_ros_ws/devel -- Using CMAKE_PREFIX_PATH: /opt/ros/noetic -- This workspace overlays: /opt/ros/noetic -- Found PythonInterp: /home/ema/miniconda3/bin/python3 (found suitable version "3.8.18", minimum required is "3") -- Using PYTHON_EXECUTABLE: /home/ema/miniconda3/bin/python3 -- Using Debian Python package layout -- Found PY_em: /usr/lib/python3/dist-packages/em.py -- Using empy: /usr/lib/python3/dist-packages/em.py -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/ema/rk3588_ros_ws/build/test_results -- Forcing gtest/gmock from source, though one was otherwise available. -- Found gtest sources under '/usr/src/googletest': gtests will be built -- Found gmock sources under '/usr/src/googletest': gmock will be built -- Found PythonInterp: /home/ema/miniconda3/bin/python3 (found version "3.8.18") -- Found Threads: TRUE -- Using Python nosetests: /usr/bin/nosetests3 -- catkin 0.8.10 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- Using CATKIN_WHITELIST_PACKAGES: vison_msgs;ros_rknn_yolo -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 1 packages in topological order: -- ~~ - ros_rknn_yolo -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'ros_rknn_yolo' -- ==> add_subdirectory(ros_rknn_yolo) -- Check if compiler accepts -pthread -- Check if compiler accepts -pthread - yes -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Found OpenCV: /usr (found version "4.2.0") CMake Error at /home/ema/rk3588_ros_ws/build/ros_rknn_yolo/cmake/ros_rknn_yolo-genmsg.cmake:3 (message): Could not find messages which '/home/ema/rk3588_ros_ws/src/ros_rknn_yolo/srv/DoYolo.srv' depends on. Did you forget to specify generate_messages(DEPENDENCIES ...)? Cannot locate message [YoloResult] in package [vision_msgs] with paths [['/opt/ros/noetic/share/vision_msgs/cmake/../msg']] Call Stack (most recent call first): /opt/ros/noetic/share/genmsg/cmake/genmsg-extras.cmake:307 (include) ros_rknn_yolo/CMakeLists.txt:33 (generate_messages) -- Configuring incomplete, errors occurred! See also "/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeOutput.log". See also "/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeError.log". Invoking "cmake" failed ema@ema:~/rk3588_ros_ws$ catkin_make -DCATKIN_WHITELIST_PACKAGES="vision_msgs;ros_rknn_yolo" Base path: /home/ema/rk3588_ros_ws Source space: /home/ema/rk3588_ros_ws/src Build space: /home/ema/rk3588_ros_ws/build Devel space: /home/ema/rk3588_ros_ws/devel Install space: /home/ema/rk3588_ros_ws/install #### #### Running command: "cmake /home/ema/rk3588_ros_ws/src -DCATKIN_WHITELIST_PACKAGES=vision_msgs;ros_rknn_yolo -DCATKIN_DEVEL_PREFIX=/home/ema/rk3588_ros_ws/devel -DCMAKE_INSTALL_PREFIX=/home/ema/rk3588_ros_ws/install -G Unix Makefiles" in "/home/ema/rk3588_ros_ws/build" #### -- The C compiler identification is GNU 9.4.0 -- The CXX compiler identification is GNU 9.4.0 -- Check for working C compiler: /usr/bin/cc -- Check for working C compiler: /usr/bin/cc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Detecting C compile features -- Detecting C compile features - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Detecting CXX compile features -- Detecting CXX compile features - done -- Using CATKIN_DEVEL_PREFIX: /home/ema/rk3588_ros_ws/devel -- Using CMAKE_PREFIX_PATH: /opt/ros/noetic -- This workspace overlays: /opt/ros/noetic -- Found PythonInterp: /home/ema/miniconda3/bin/python3 (found suitable version "3.8.18", minimum required is "3") -- Using PYTHON_EXECUTABLE: /home/ema/miniconda3/bin/python3 -- Using Debian Python package layout -- Found PY_em: /usr/lib/python3/dist-packages/em.py -- Using empy: /usr/lib/python3/dist-packages/em.py -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/ema/rk3588_ros_ws/build/test_results -- Forcing gtest/gmock from source, though one was otherwise available. -- Found gtest sources under '/usr/src/googletest': gtests will be built -- Found gmock sources under '/usr/src/googletest': gmock will be built -- Found PythonInterp: /home/ema/miniconda3/bin/python3 (found version "3.8.18") -- Found Threads: TRUE -- Using Python nosetests: /usr/bin/nosetests3 -- catkin 0.8.10 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- Using CATKIN_WHITELIST_PACKAGES: vision_msgs;ros_rknn_yolo -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 2 packages in topological order: -- ~~ - vision_msgs -- ~~ - ros_rknn_yolo -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'vision_msgs' -- ==> add_subdirectory(vision_msgs) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- vision_msgs: 14 messages, 0 services -- +++ processing catkin package: 'ros_rknn_yolo' -- ==> add_subdirectory(ros_rknn_yolo) -- Check if compiler accepts -pthread -- Check if compiler accepts -pthread - yes -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Found OpenCV: /usr (found version "4.2.0") -- ros_rknn_yolo: 0 messages, 1 services git clone sahi success created virtual environment CPython3.8.10.final.0-64 in 311ms creator CPython3Posix(dest=/home/ema/rk3588_ros_ws/src/ros_rknn_yolo/venv, clear=False, global=True) seeder FromAppData(download=False, pip=latest, setuptools=latest, wheel=latest, pkg_resources=latest, via=copy, app_data_dir=/home/ema/.local/share/virtualenv/seed-app-data/v1.0.1.debian.1) activators BashActivator,CShellActivator,FishActivator,PowerShellActivator,PythonActivator,XonshActivator Installing python dependencies of ros_rknn_yolo /home/ema/rk3588_ros_ws/src/ros_rknn_yolo/venv/bin/pip /home/ema/rk3588_ros_ws/src/ros_rknn_yolo/requirements.txt CMake Error at ros_rknn_yolo/CMakeLists.txt:73 (message): Install python dependencies failed -- Configuring incomplete, errors occurred! See also "/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeOutput.log". See also "/home/ema/rk3588_ros_ws/build/CMakeFiles/CMakeError.log". Invoking "cmake" failed -
@shlfan 第一次运行错误,可以先只编译vision_msgs包
catkin_make -DCATKIN_WHITELIST_PACKAGES="vison_msgs"第二次运行的错误是安装python虚拟环境的依赖包出了问题,手动执行CMakeLists.txt中的58行指令安装,看报什么错误,一般是网络问题。
还有一个注意点,这个包默认的python版本是3.10,你的是3.8版本,rknn_toolkit_lite2的安装包要自己换成3.8版本的,同时修改CMakeLists.txt中的88行。
-
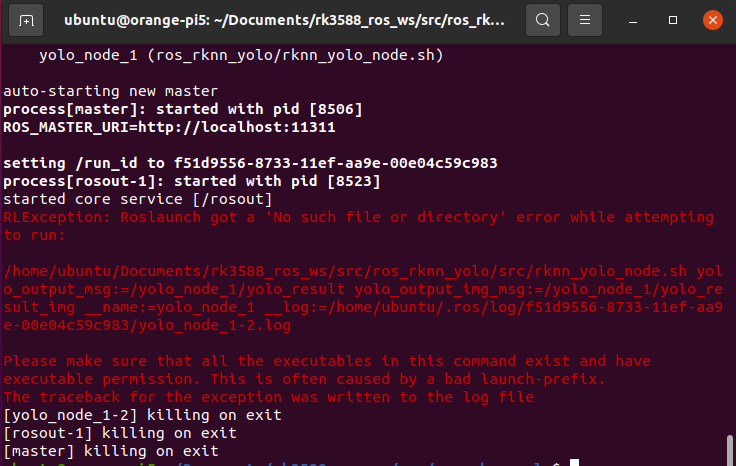
您好,请问下,我再成功构建了ros_rknn_yolo包后,在按照教程到输入’roslaunch ros_rknn_yolo xiaoqiang_yolo.launch‘指令,并更改了default.yaml文件的模型路径后,出现了如下报错,能麻烦您看看这是怎么回事吗:
-
@natsuki 在 rk3588在ros中使用ros_rknn_yolo包 中说:
ros_rknn_yolo文件夹内有没有正确创建venv子文件夹,检查venv内的python虚拟环境是否正确创建了。
同时可以手动按行执行一下rknn_yolo_node.sh这个bash文件中的指令内容,看是哪一行出了问题。