ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
激光雷达建图的时候map出现没有接收数据的情况
-
打开rplidara2test后map下面显示no map received,请问这是因为什么
-
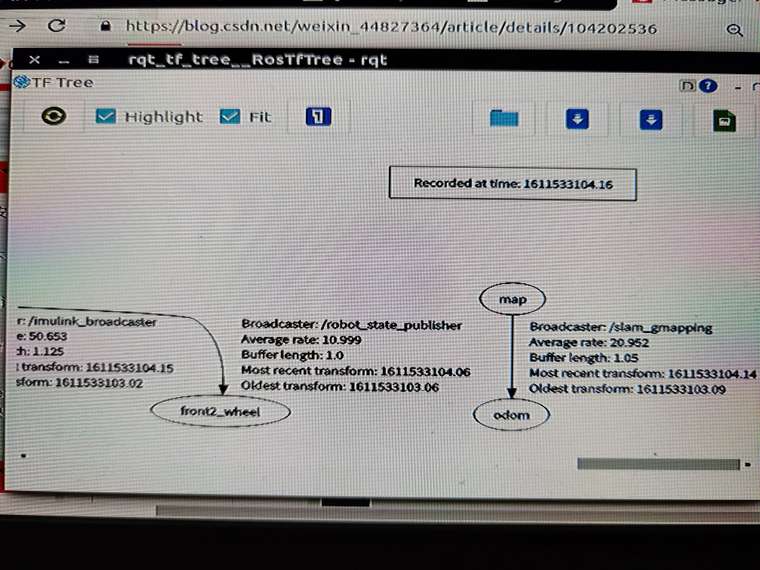
@叫我小冬枣 用tf查看工具检查tf树是否完整,用rostopic hz工具检查里程计和scan话题是否已经发布
-
@xiaoqiang 请问小强自带有tf查看工具吗,我之前在用的时候没出现过这种情况,不知道为什么就变成这样了
-
@xiaoqiang 请问查看tf后是这种情况该怎么办
-
@xiaoqiang
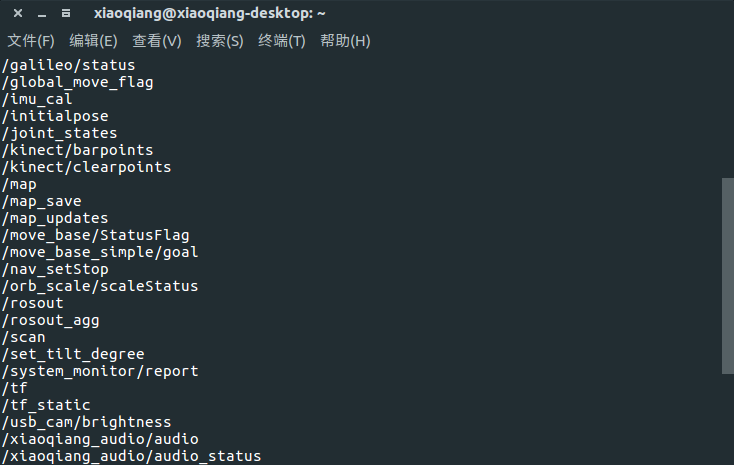
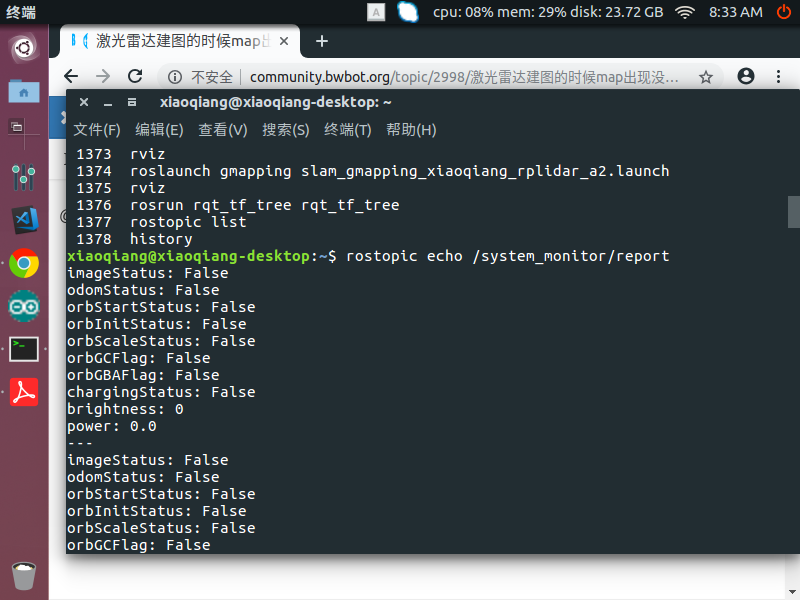 并且查看这两个命令的时候显示的是这样子的
并且查看这两个命令的时候显示的是这样子的 -
@叫我小冬枣 里程计部分没有发布,检查底盘驱动xqserial_server包是否正常启动,底盘串口有没有插好,底盘有没有上电
-
@xiaoqiang 请问不能建图是因为tf树不完整吗?