ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS教程v1.1版 (2)基础操作介绍和局域网键盘遥控
-
开始之前
以下的教程重点在于使用小强的各种功能,并不包含对ROS的教学。如果您是ROS的初学者,请在进行下面的教程的同时跟进学习ROS基础知识。 请不要只跟着我们的教程输入指令,要理解每一个命令的具体含义。遇到问题时也要善于自己寻找问题的原因,这些对于以后的工作学习都会很有帮助。如果您遇到了关于教程或者ROS不理解的地方也欢迎在我们ROS交流群(538456117)中提问。
首先请您自行依据线标提示将小强接线连接好,完整结构如下图所示

1.配置小强网络
使用赠送的hdmi转vga插头(小强mini可以直接使用vga),将显示器和键盘鼠标接入小强主机后开机,进入主机ubuntu系统。
小强默认密码是 xiaoqiang点击下图位置,选择需要接入的无线网络

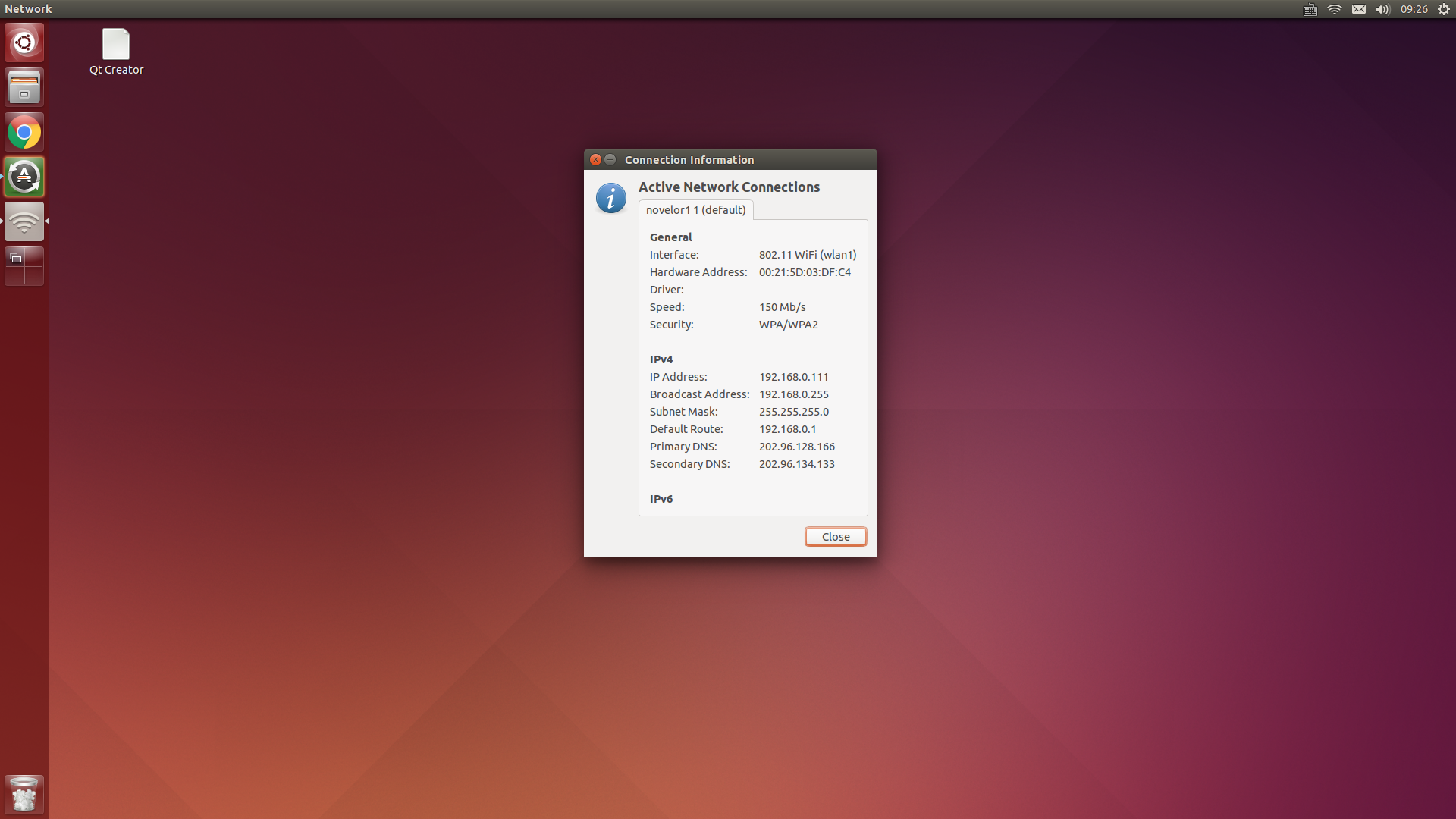
接入网络后,点击下图位置得到小强的实际ip地址,后续教程会频繁使用到这个ip信息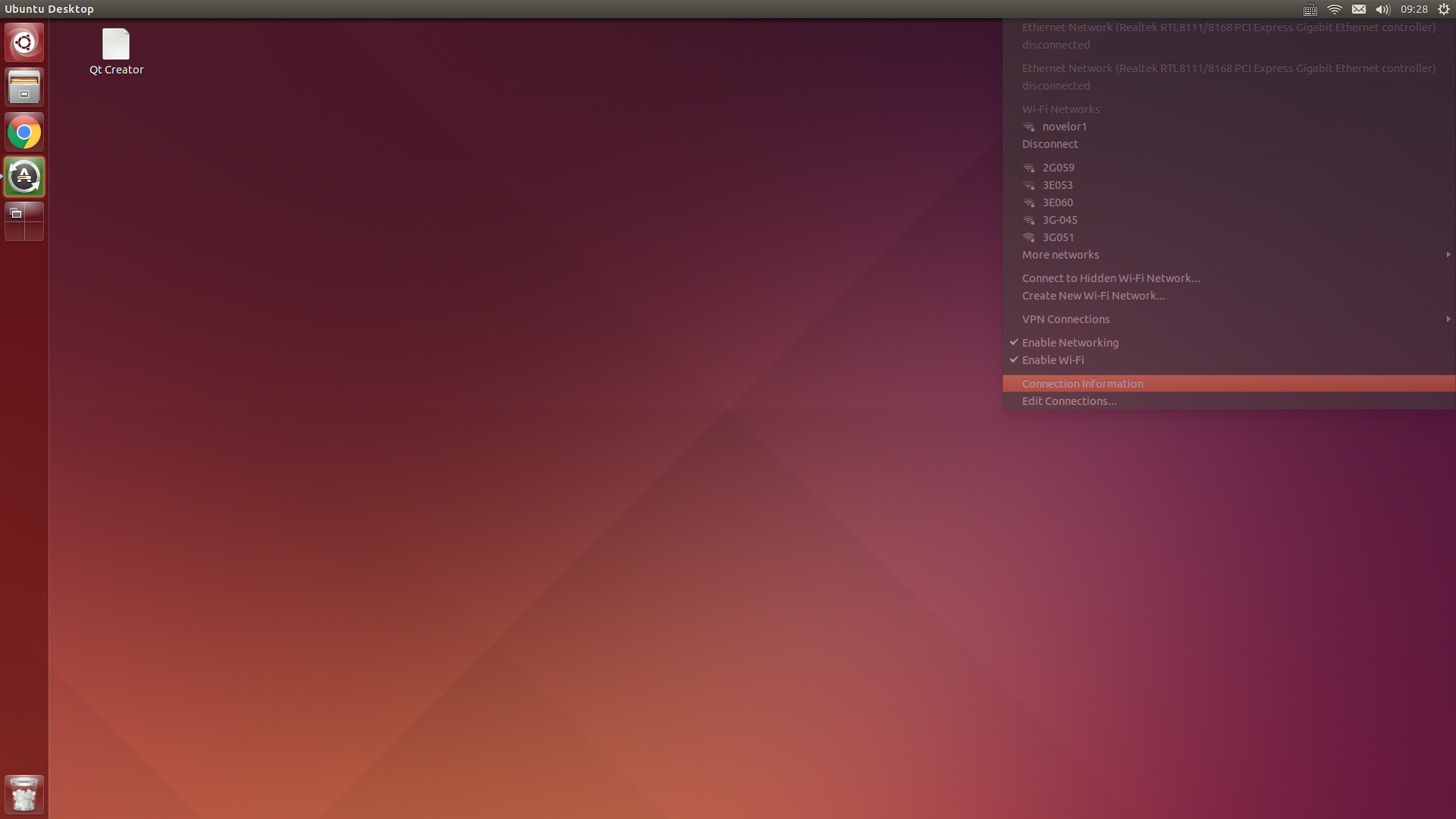
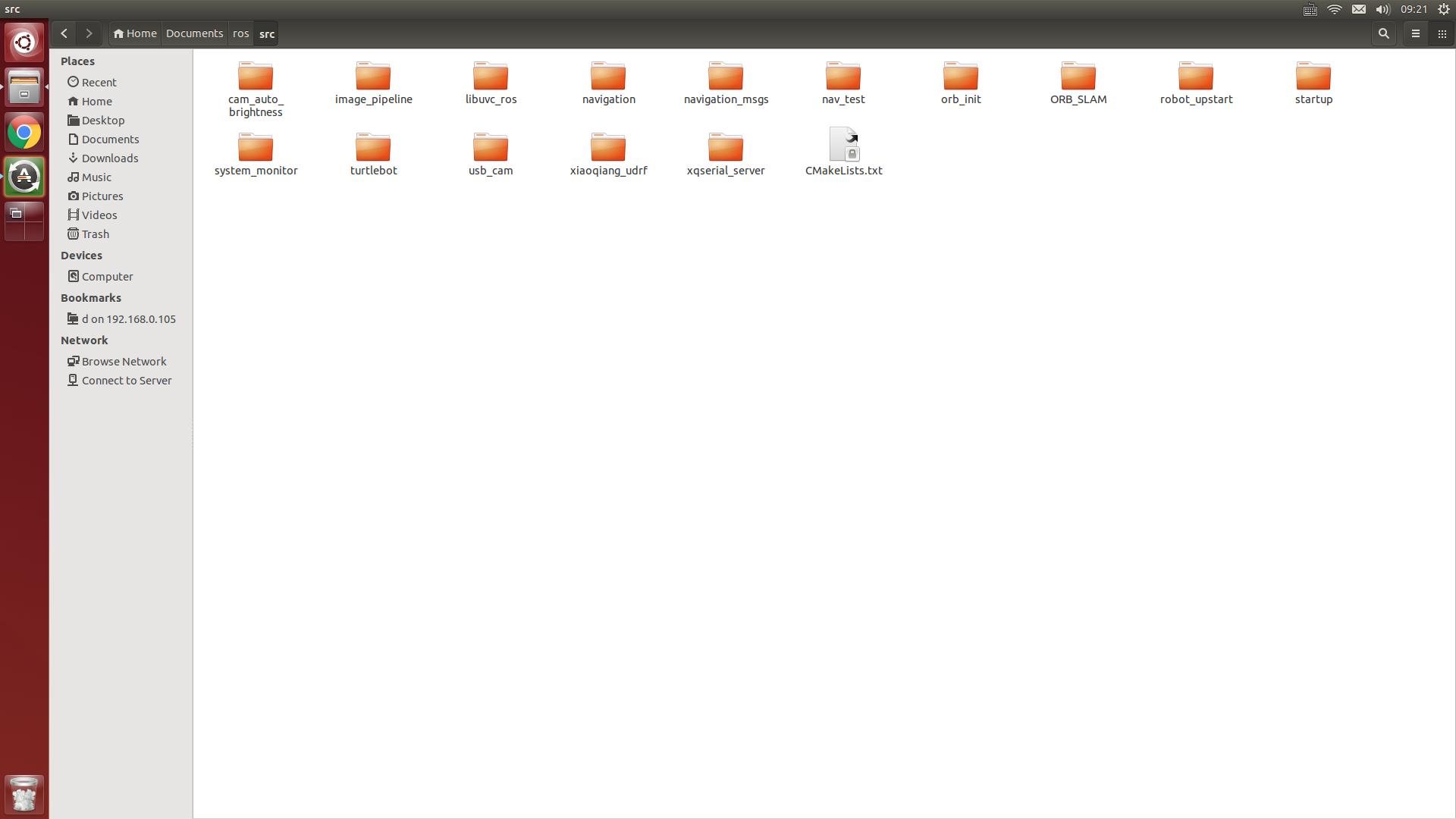
小强的ROS默认工作目录在这里
现在小强已经配置完成了,关机后拔掉键盘鼠标和显示器,下次小强直接开机就能使用
2.本地遥控端配置
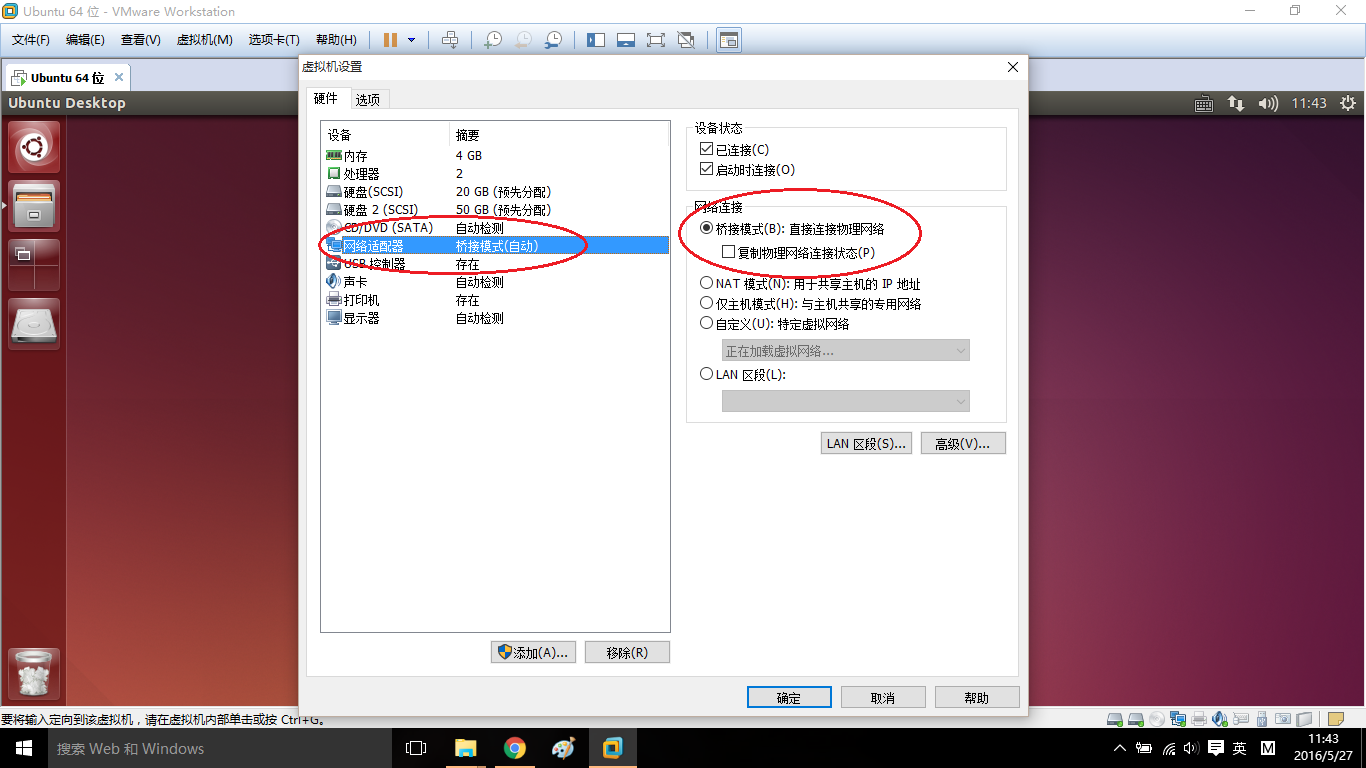
本地遥控端最好是一台安装ubuntu16.04 64bit操作系统的x86主机,如果您只有windows平台,可以先安装vmware虚拟机 下载地址,然后在虚拟机里安装ubuntu。
镜像下载和安装教程, 推荐安装使用已经配置好ROS的小强镜像。
最后保证虚拟机必须和小强在同一个局域网下
系统部署完后开始配置ubuntu系统建议安装atom编辑器(小强镜像系统已经安装),可以方便地对小强主机上的软件包进行代码编辑
键盘遥控
(1)在本地遥控端打开一个终端
(2)通过ssh连接小强,请将xxx换成实际的ip
ssh xiaoqiang@xxx.xxx.xxx.xxx(3)启动遥控程序
# 在启动小强驱动程序后执行 rosrun xiaoqiang_controller controller.py # 如果小强驱动程序未执行,请先执行 roslaunch xiaoqiang_bringup xiaoqiang_robot.launch(4)可以开始通过方向键来控制小强的移动了。空格键是停止。Ctrl + C 退出程序。
小车的移动控制是通过发布名字为
/cmd_vel的topic来实现的,这个topic是geometry_msg下的Twist类型,它的发布方法请参考ros官方文档,小车上的controller.py源代码也是一份不错的参考实例。