ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
使用xiaoqiang_track进行人体跟随和追踪
-
@weijiz 博主的意思是以后只能用python3实现了吗
-
@huapiaoxiang21 python2.7也可以,只不过这里好像已经移除了。可以直接装pip里面的cpu版本tensorflow
-
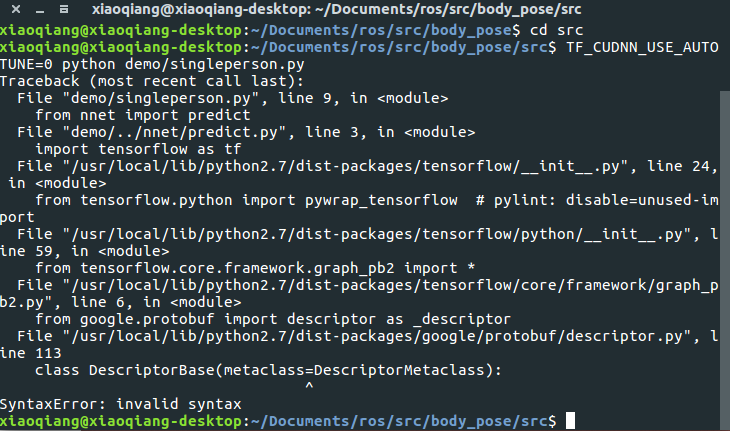
body_pose运行单人测试程序时出现:
Traceback (most recent call last):
File “demo/singleperson.py”, line 8, in
from config import load_config
File “demo/…/config.py”, line 6, in
from easydict import EasyDict as edict
ImportError: No module named easydict
请问该如何解决。 -
@httttt 相关依赖没有安装吧
sudo pip install scipy scikit-image matplotlib pyyaml easydict cython munkres==1.0.12也可以使用https://git.bwbot.org/publish/body_pose 包。catkin_make时会自动安装依赖
-
@weijiz 安装了tensorflow和相关依赖后还是出现了问题
-
@httttt 你的是什么系统,这里的需要python3,2.7已经不支持了
-
@weijiz xq4的镜像,ubuntu16.04
-
请问想要在ros melodic上使用本程序,需要做哪些修改呢
-
@qwertyuiop 用这个版本https://git.bwbot.org/publish/xiaoqiang_track
-
-
博主,你好,请问body_pose包可以支持python3版本嘛
-
@huapiaoxiang21 支持现在应该只支持python3, https://git.bwbot.org/publish/body_pose
-
-
此回复已被删除! -
@huapiaoxiang21 博主,您的python3的运行版本是?
-
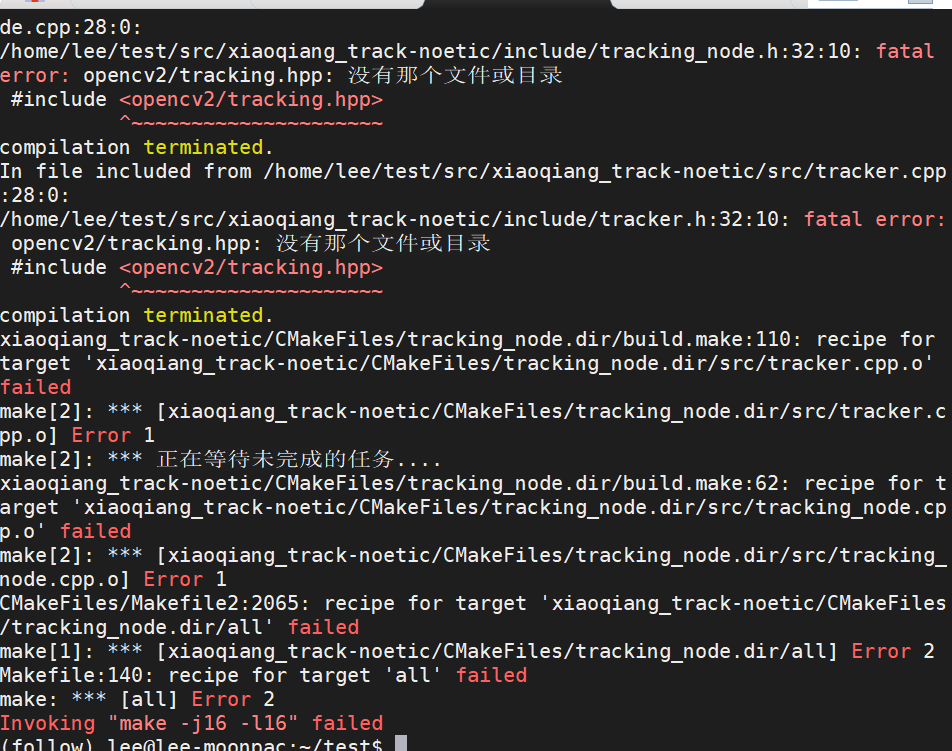
博主,您好,我在ubuntu18.04上编译xiaoqiang_tracker这个包出现错误,使用conda建立resquestments所需的环境 -
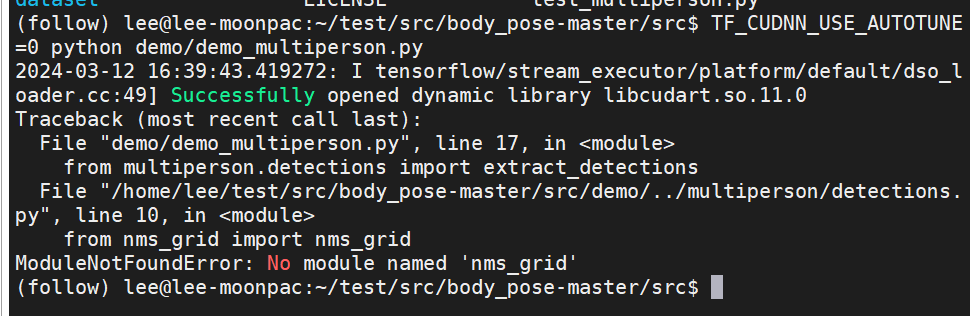 body_pose在运行多人检测时出现这样的错误,没找到cpython编译文件
body_pose在运行多人检测时出现这样的错误,没找到cpython编译文件