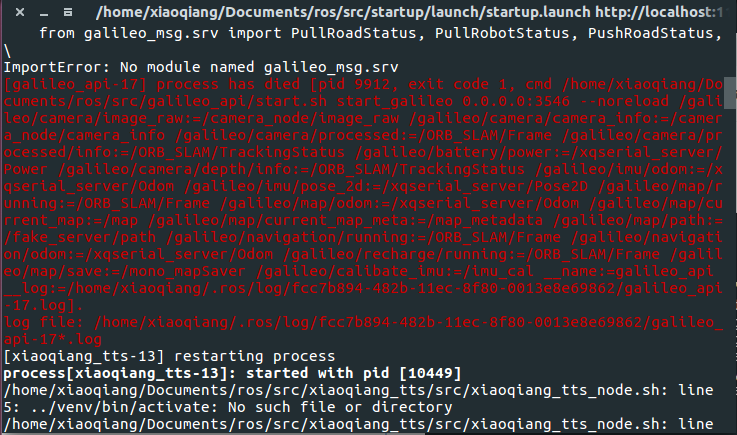
@weijiz 伽利略系统现在可以连上小车,但遥控功能和建图功能都无法使用。
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
httttt 发布的最新帖子
-
RE: 使用xiaoqiang_track进行人体跟随和追踪发布在 技术交流
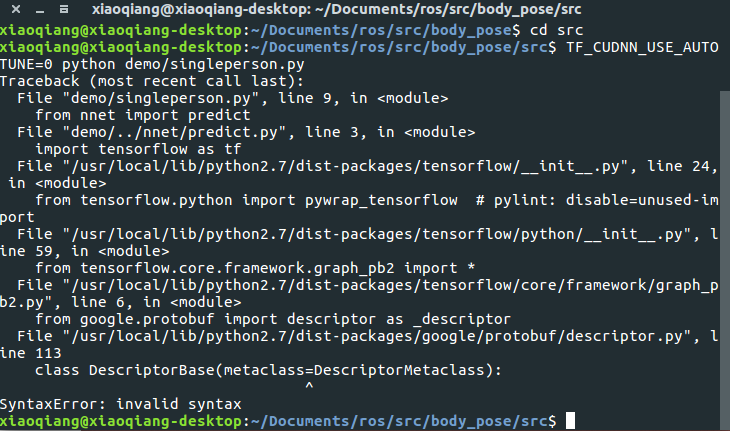
body_pose运行单人测试程序时出现:
Traceback (most recent call last):
File “demo/singleperson.py”, line 8, in
from config import load_config
File “demo/…/config.py”, line 6, in
from easydict import EasyDict as edict
ImportError: No module named easydict
请问该如何解决。