ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理
-
为什么我的机器人距离充电桩一点点距离,就是对不上.
-
@xxxxxxxxxxxx 相关参数需要调整,比如超声波触发的距离,pid的控制参数。odom是否准确。充电桩的高度是否合适。
-
保存不了充电桩的位置,odom,保存路径都设置好了。发布了保存命令后没有反应。![替代文字]
-
@海涛 先看红外传感器数据,有数据了才能保存
-
This post is deleted! -
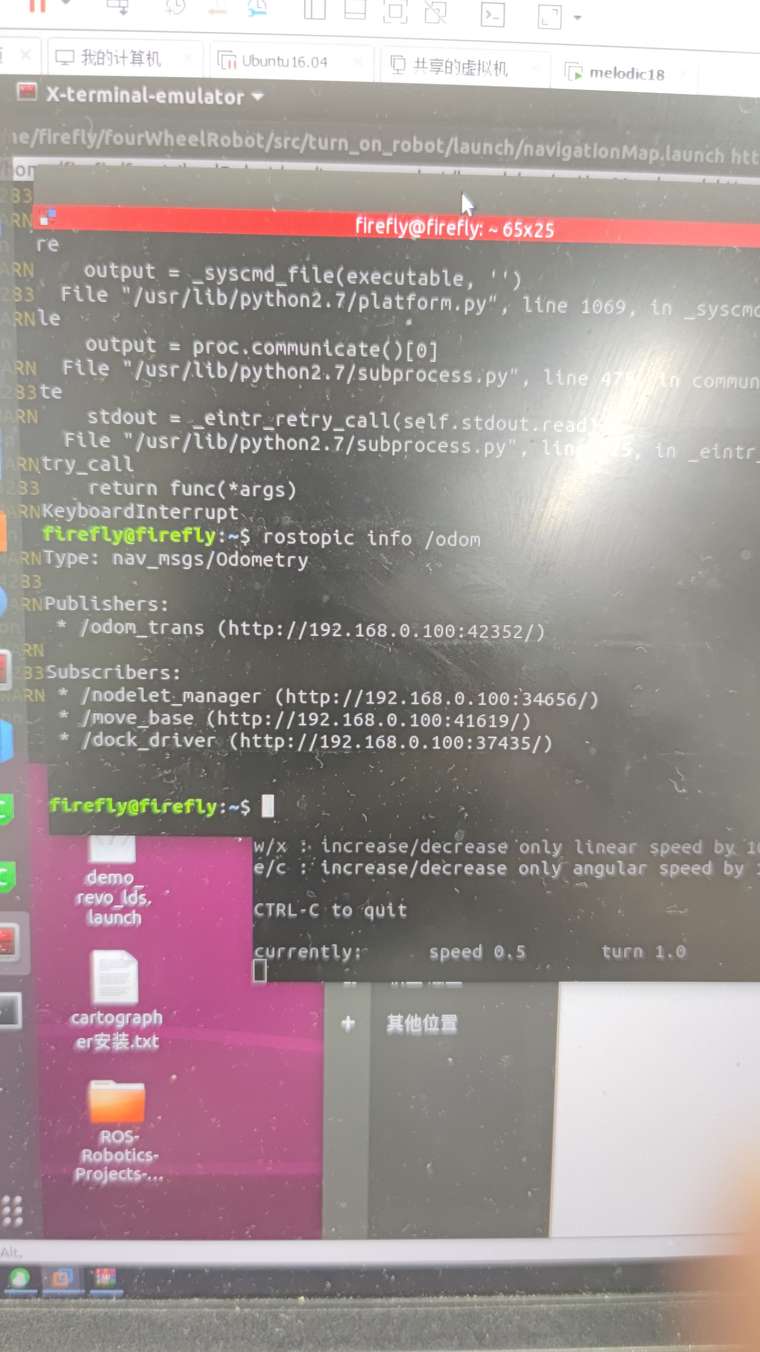
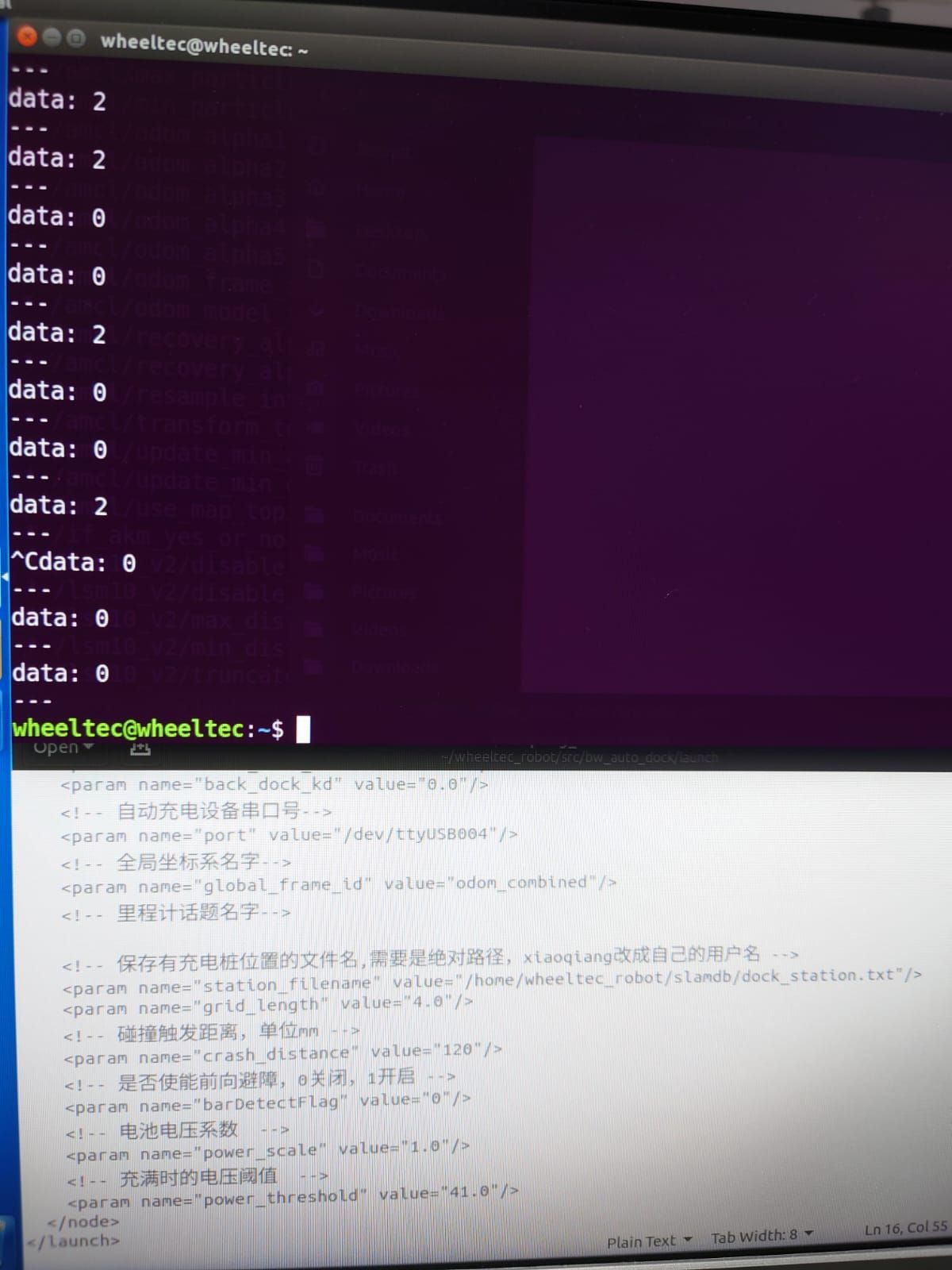
充电接收模块上的红外传感器通过串口读取不到数值,是不是接收模块坏了?运行这个指令roslaunch bw_auto_dock xiaoqiang_local.launch 后没有报错。然后使用rostopic echo 命令显示4个红外传感器接收的数据值,但没有数据显示
-
@whq 代码branch分支要对,不能是master分支。ros驱动包要确保正常运行了,即launch运行窗口没有错误提示
-
@xiaoqiang 好的,我用的是ROS 版本是Melodic,我重新下载下ROS包试试看
-
@xiaoqiang 在 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理 中说:
udevadm info --name=/dev/ttyUSBXXX --attribute-walk
没有找到设备这是为什么
-
@yylee ttyUSBxxx中的xxx要换成实际数字
-
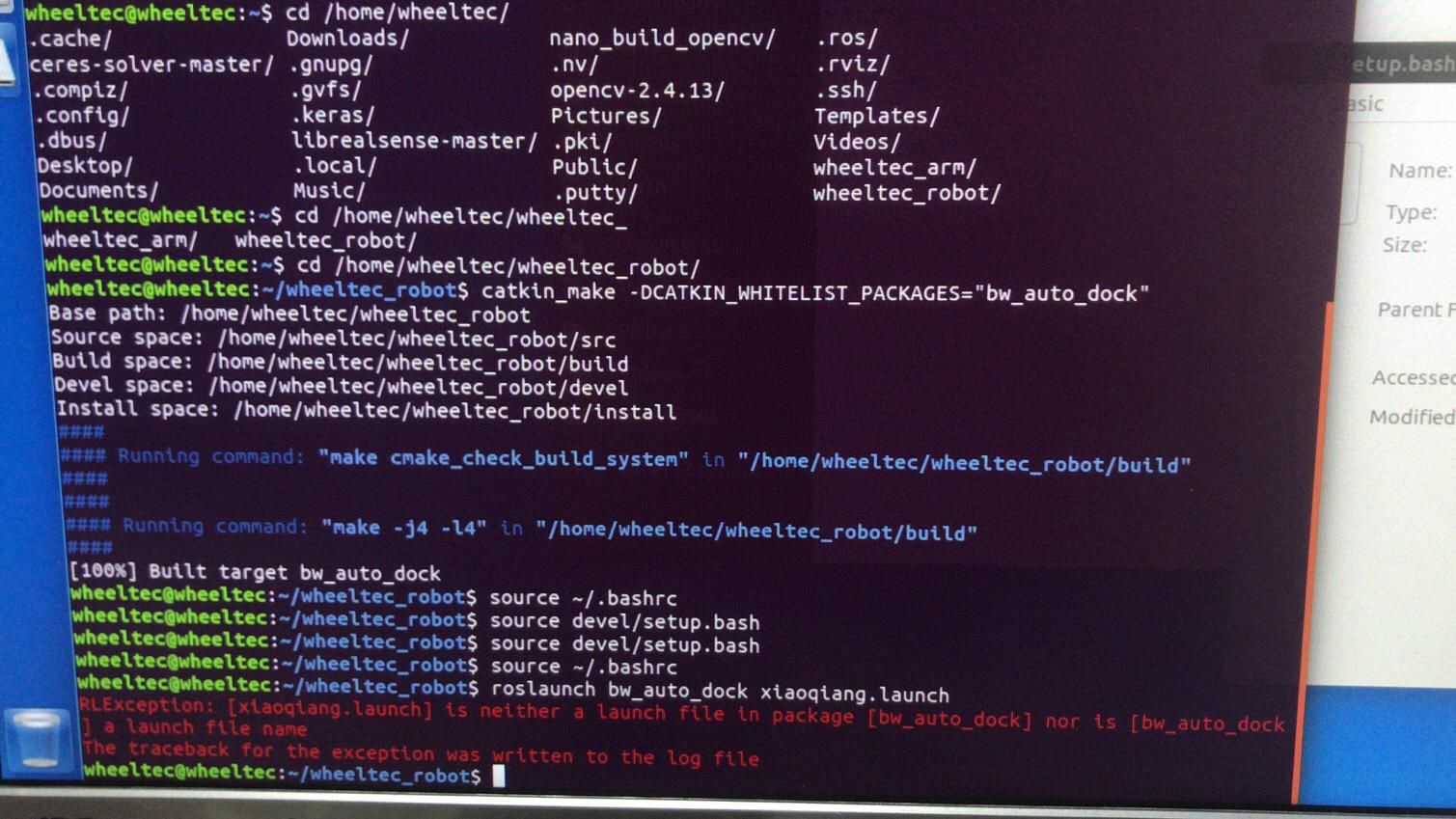
Jetson Nano上的ubuntu 編譯成功但roslaunch失敗 是什麼原因
-
@dennis source的路径不对
-
@xiaoqiang 解決了 謝謝
-
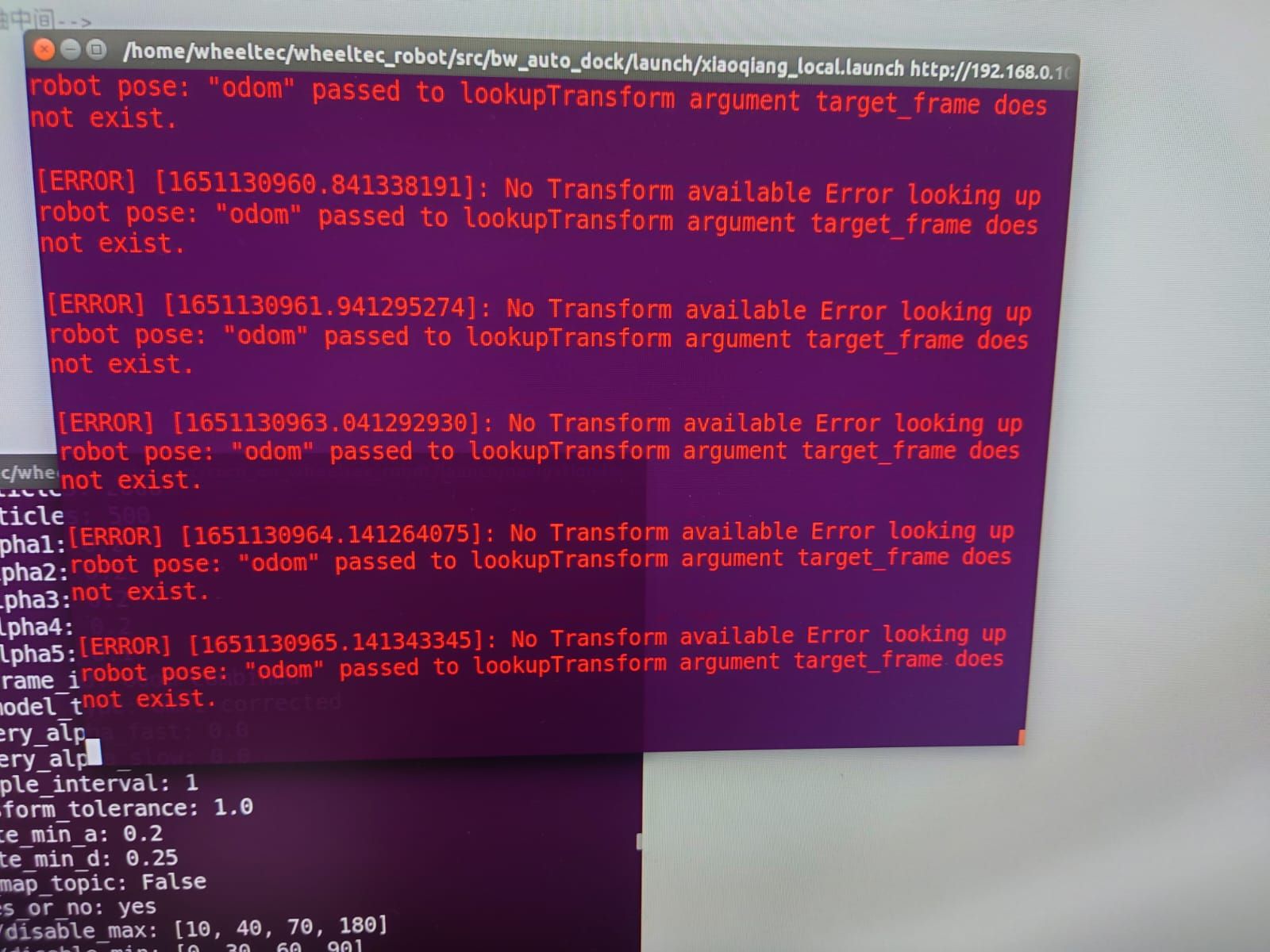
不好意思 想問一下這個問題要怎麼解決 謝謝
-
@dennis 里程计tf没有发布
-
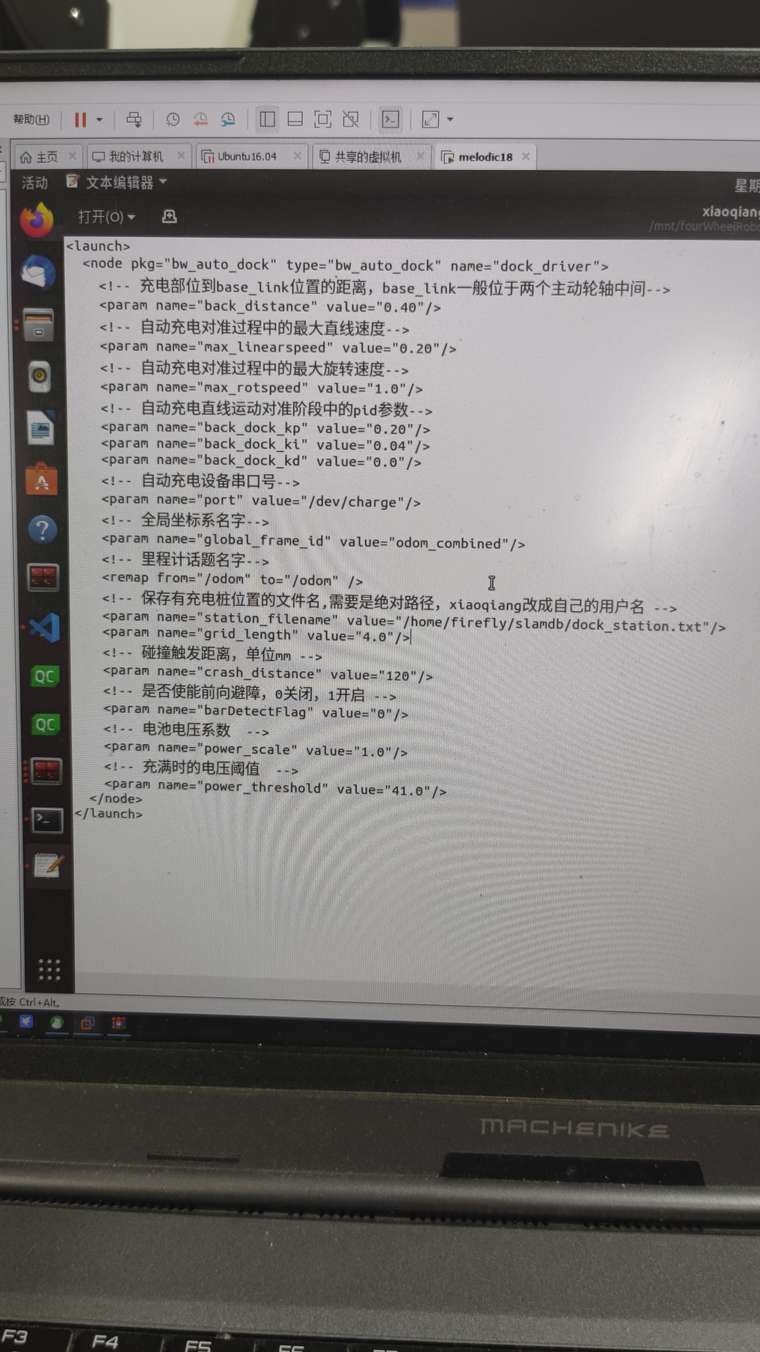
@xiaoqiang 我用rostopic echo /tf 看到有數據 下面是我的launch file 是不是還有其他問題 謝謝
-
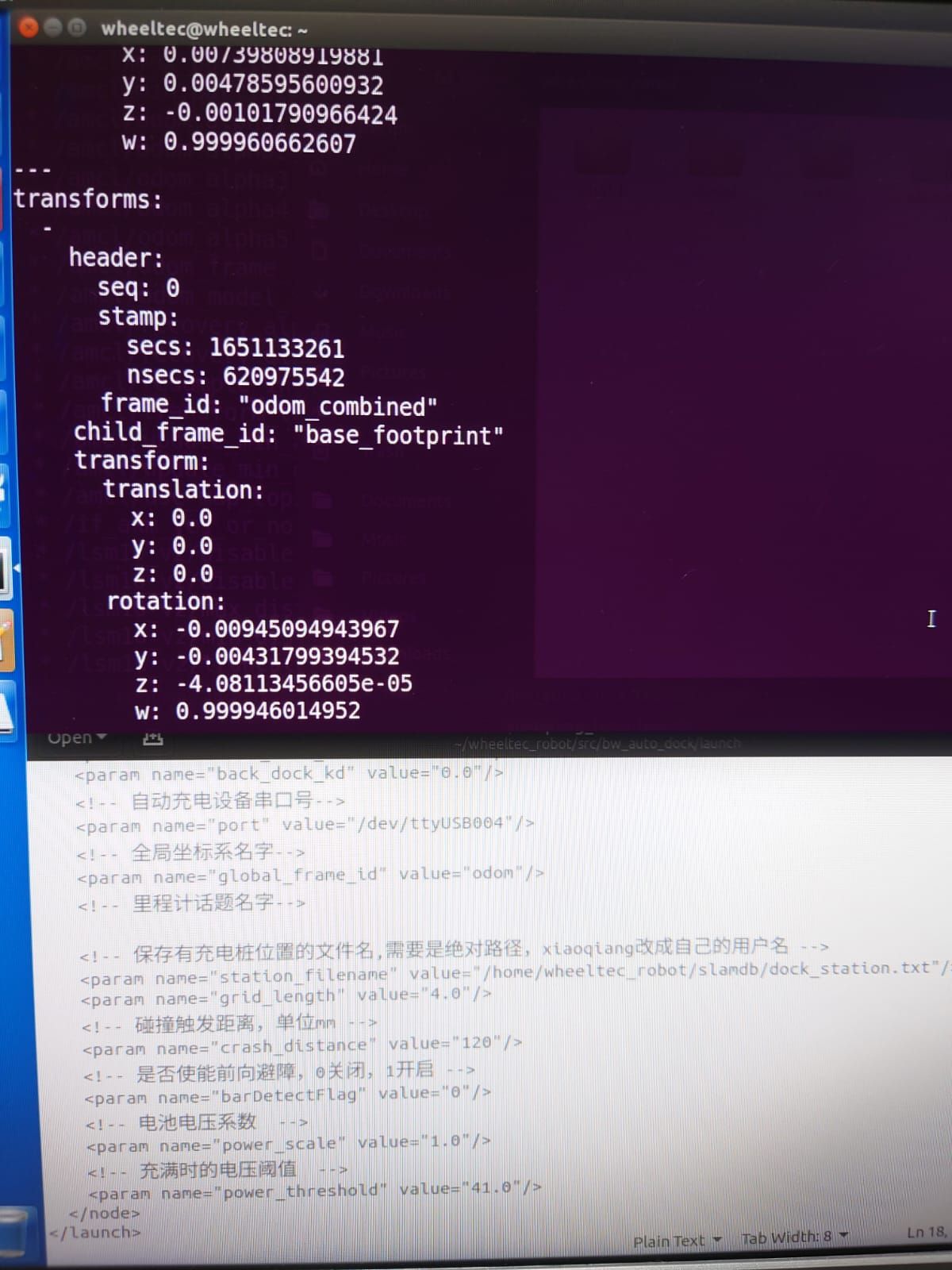
@dennis 观察你的frame_id
-
@xiaoqiang 謝謝. 改了launch file內的param name=“global_frame_id” value=“odom_combined” 就沒有error和rostopic echo IRSensor1 有數據回 但dockposition 生成不到file.
-
@dennis odom_combined的话题类型需要是标准的里程计话题,不能是其它类型话题
-
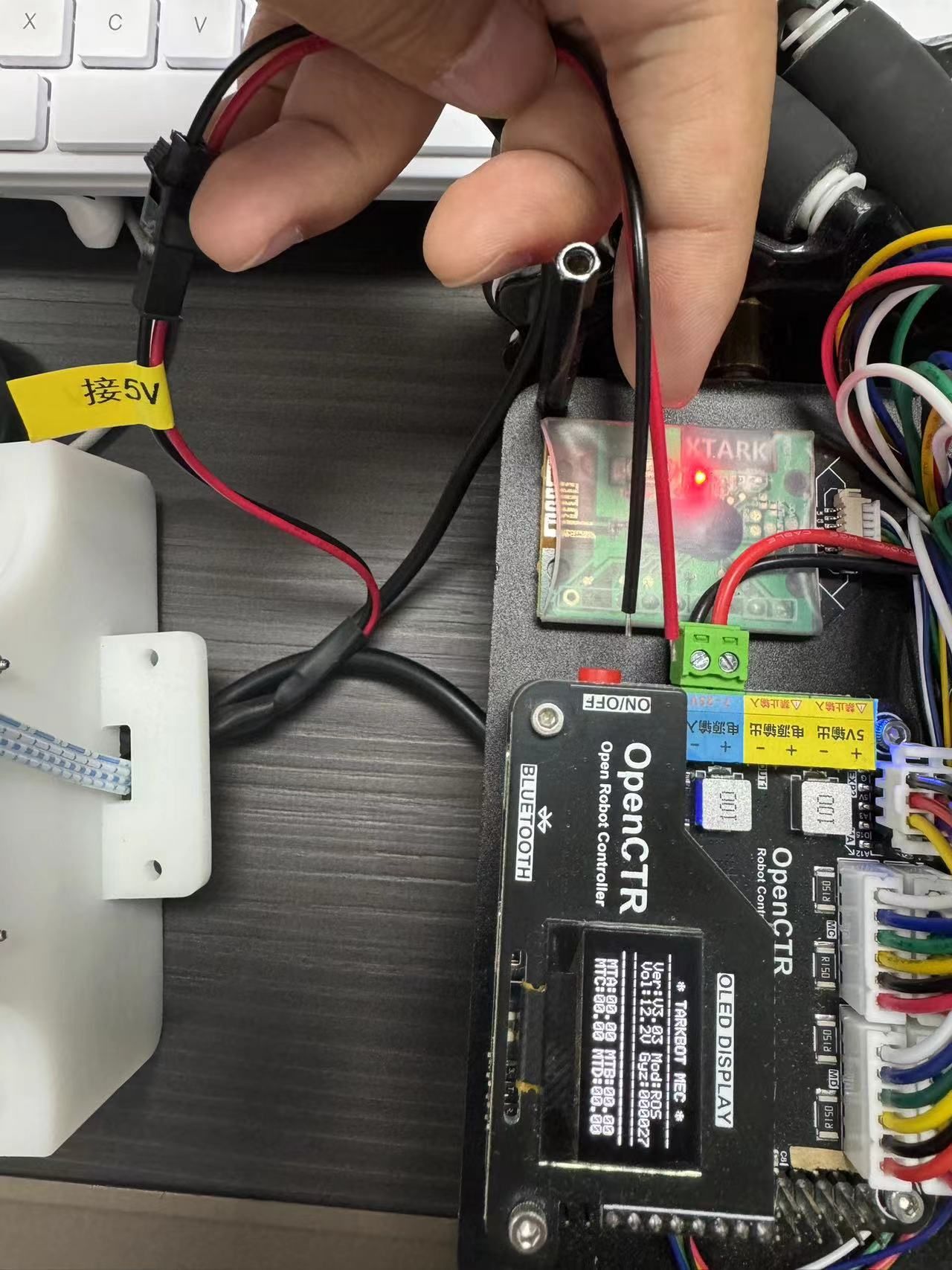 请问这个接5V的线是连接电源输入的吗,但是我这里的电源输入适配7~25V的电压,我应该怎么办
请问这个接5V的线是连接电源输入的吗,但是我这里的电源输入适配7~25V的电压,我应该怎么办