ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang tutorial (14) using rplidar A2 with gmapping
-
Using rplidar A2 with gmapping
1.Start the gmapping node
Ensure that the lidar is properly installed, and launch the gmapping launch file after ssh login the host.
ssh xiaoqiang@192.168.XXX.XXX roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a2.launchOpen rviz in the local virtual machine, select the
slam_gmapping/gmapping/launch/rplidar_a2_test.rvizconfiguration file and open it in Xiaoqiang ROS directory.Note: Some systems can't do this. You can copy that file directly to your local computer and open it locally.export ROS_MASTER_URI=http://xiaoqiang-desktop:11311 rviz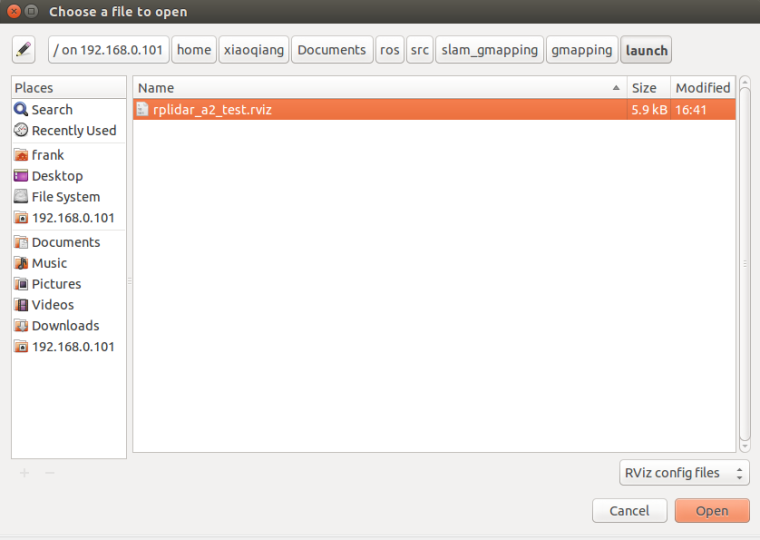
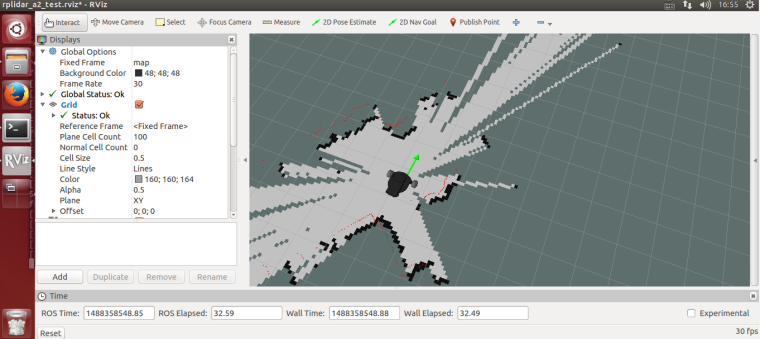
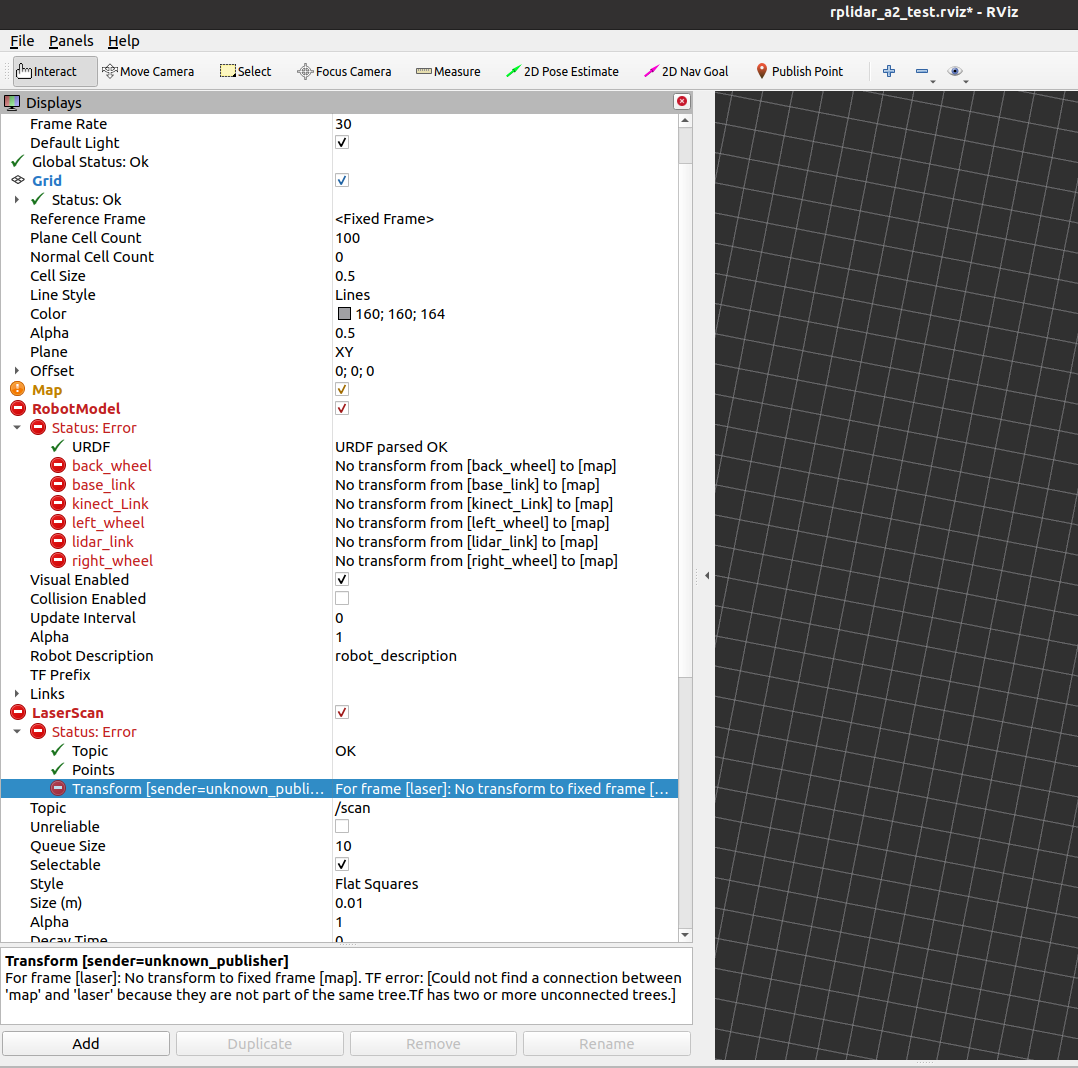
Wait a few seconds, normal results similar to the following figure will appear.
2.Remote control Xiaoqiang and start to build a map
The first way: use the windows remote control client, refer to this post
The second way:using the ssh remote control
ssh xiaoqiang@192.168.XXX.XXX rosrun nav_test control.pyThe third way: use mobile app, refer to this post Xiaoqiang mobile remote control app for Android
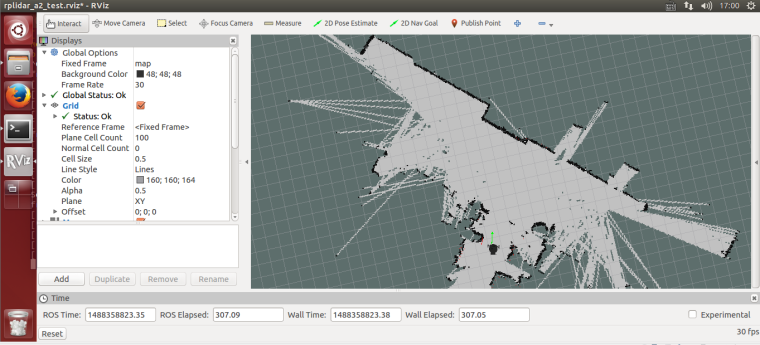
3.Save the map
ssh login Xiaoqiang, in the Xiaoqiang home directory save the map as the beginning of work0 file.
ssh xiaoqiang@192.168.XXX.XXX rosrun map_server map_saver -f work0
-
@weijiz 在 xiaoqiang tutorial (14) using rplidar A2 with gmapping 中说:
am_gmapping_xiaoqiang_rplida
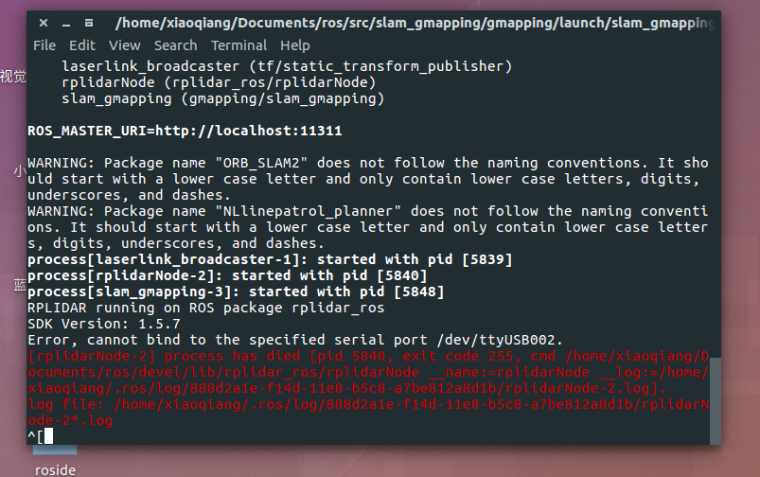
启动roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a2.launch 时报错,是什么原因呢? 会不会影响在rviz中构建地图?
-
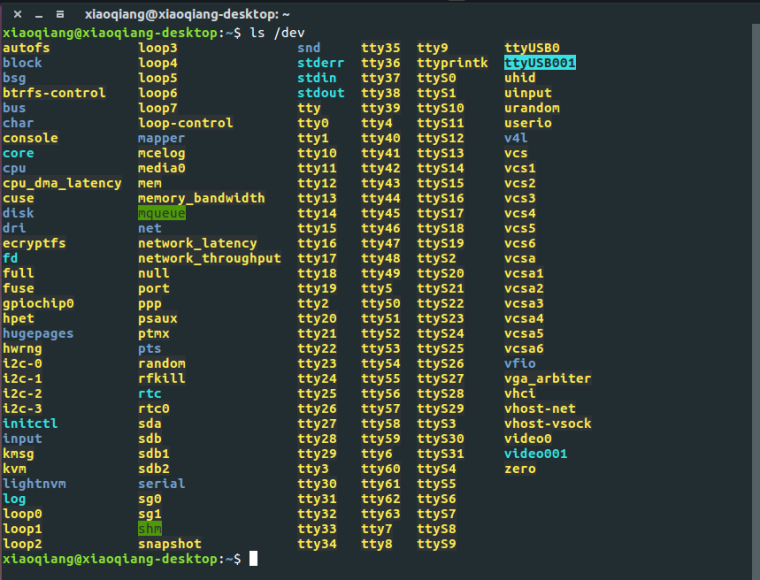
@ccsky Check if the rplidar is connected to the car host computer usb port.
Run "ls /dev " ,check ttyUSB002 is listed or not -
没有ttyUSB002, 我们用的是XQ-4 Pro的小车。这个不是带有雷达吗?
-
@ccsky 你的雷达没有对应的串口设备。可能是雷达的串口没插好。也有可能雷达是坏的
-
@weijiz 如果列出usb001和usb002,还报出这个错误是什么原因
-
@雾琴水音 看看权限设置对不对,一般有这个的话是不会出现上面的错误的
-
@weijiz 好的 谢谢您
-
您好RVIZ最后出现这种情况怎么处理呢 可以说稍微详细一些嘛 谢谢了
-
@qq303956 上面rviz错误是tf关系缺失,检查tf树,可能原因:里程计没有正常发布,或gmapping没有正常工作导致map到odom这个tf关系没发布